182 MW Continuum Bhavnagarサイトの概要
グジャラート州のユーティリティスケール太陽光発電所は、空気中の高濃度な粉塵と、持続可能な水管理の必要性という2つの課題に直面しています。Bhavnagarの182 MW太陽光発電設備は、クリーンエネルギーへの重要な取り組みを象徴していますが、この地域の多くの大規模プロジェクトと同様に、汚れに起因するパフォーマンス比(PR)の低下が恒常的な課題となっていました。この規模の現場で手作業による管理を行うと、清掃サイクルが不安定になりやすく、高い管理オーバーヘッドも発生します。本ケーススタディでは、管理可能な運用コスト(OPEX)を維持しながら収益を最適化するために導入された、半自動清掃戦略の詳細を解説します。
課題:PRと運用制約のバランス

182 MWの発電所では、モジュールの清潔さがわずかに低下するだけでも、大幅な収益の損失につながります。Bhavnagarの乾燥した環境と微粒子が組み合わさることで、汚れは急速に蓄積します。従来の手作業による水洗浄では、エネルギー損失を防ぐには時間がかかりすぎるか、あるいは水の使用量が多すぎて持続不可能でした。さらに、大規模な作業員チームに依存することで清掃品質のばらつきや安全上のリスクが生じ、これらは長期的なユーティリティスケール太陽光発電所の運営における重大な懸念事項となっています。
Tayproのソリューション:半自動運用の展開
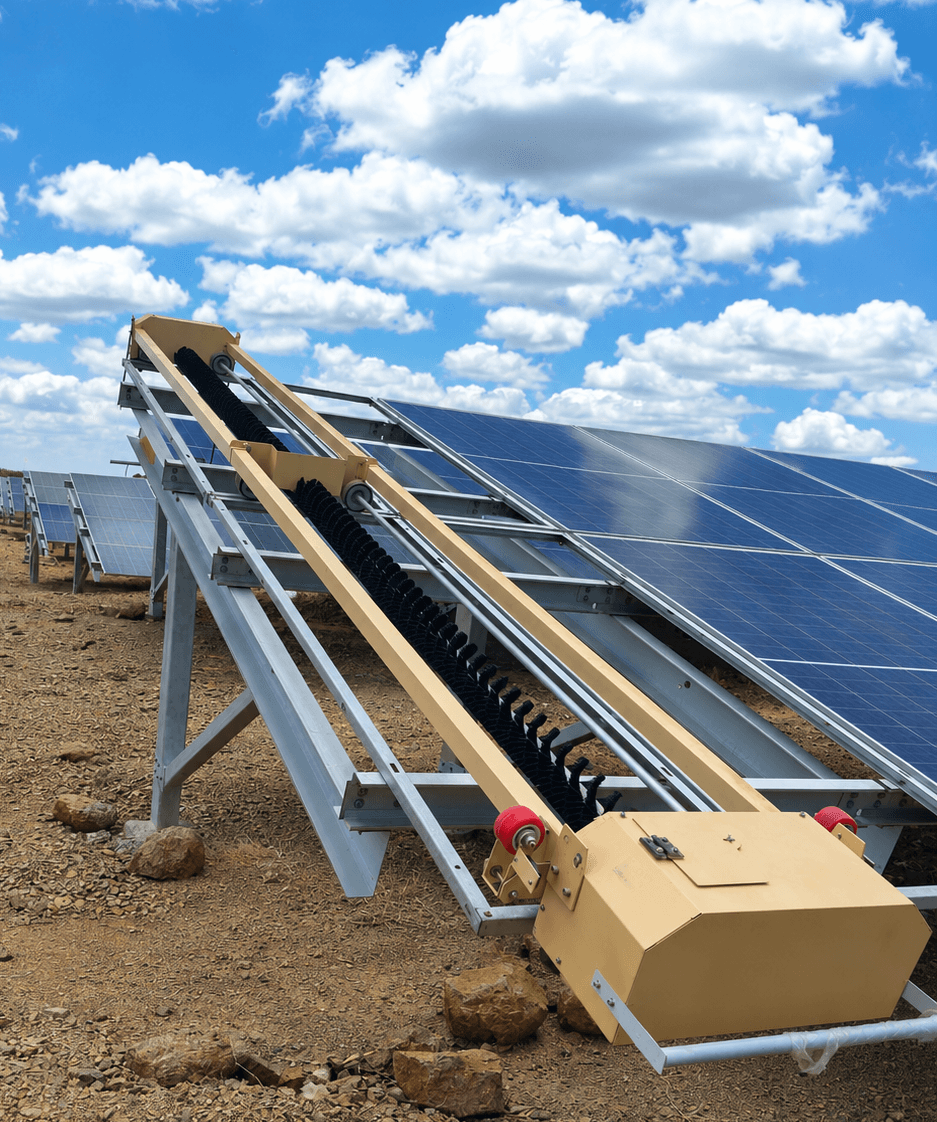
これらの課題に対処するため、堅牢な半自動ロボット清掃プログラムを導入しました。18台のロボットを導入することで、現場は従来の手作業による手法から、精密なシステムへと移行しました。このソリューションは、HELYX半自動ピックアンドプレース技術に焦点を当てており、O&Mチームは分散したプラント区画全体で一貫した清掃品質を維持できます。固定設置型のロボットとは異なり、このモデルは182 MWという広大な表面積を効率的にカバーするために必要な運用柔軟性を提供します。
戦略的な導入とO&Mの統合
Bhavnagarでのロボット主導の清掃戦略への移行は、OPEXを抑制するという明確なニーズによって促進されました。水の使用量が多い手作業チームから切り替えることで、水の手配やろ過にかかる物流コストを排除しました。当社のチームは、現地の汚れの発生率に基づいて最適な清掃頻度を決定するデータ駆動型アプローチを採用し、ロボットを既存のワークフローに統合しました。この導入事例は、すべての列にフルスケールの固定自動化設備を導入しなくても、大きなパフォーマンス向上が可能であることを証明しています。適切に管理された半自動フリートは、大規模なユーティリティ資産に対して高いインパクトをもたらします。
データによる効率化の推進
今回の導入における主な利点の1つは、フリート管理ロジックとの統合です。O&Mチームは、カレンダーに基づいた固定的な手作業スケジュールに従うのではなく、当社の診断データを利用して、ロボットが最も必要とされる場所に配置されるようにしています。パフォーマンス比の損失をリアルタイムで分析することで、現場監督者は汚れの蓄積がインバーター側の発電に大きな影響を与える前に、清掃サイクルを先制的に実行することができます。
100 MW以上の太陽光発電資産における重要性
大規模太陽光発電所の運営者にとって、Bhavnagarプロジェクトはコスト、パフォーマンス、資源の持続可能性をバランスさせるための青写真となります。この導入からの重要なポイントは以下の通りです。
- スケーラブルなOPEX: 半自動ロボットプログラムの導入により、大規模プラントに伴う人員要件と長期的な人件費を大幅に削減します。
- 水を使用しない持続可能性: 非水洗浄方式への移行により、給水車への依存がなくなるため、グジャラートのような乾燥地域では大きな物流上のメリットとなります。
- 一貫したPR: 高精度なPBTブラシでモジュールを清掃することで、発電所はより高い全体的なPRを維持し、最終的な収益に直接貢献します。
- 運用上のレジリエンス: 予測不可能な手作業から定義されたロボットワークフローへと移行することで、より安定した、監査可能で信頼性の高いO&M環境が構築されます。
ロボット清掃コストをご検討中の方や、ユーティリティスケールのプロジェクトを計画されている方は、労働集約的な手作業から半自動ロボットへの移行が、特定の現場環境において、いかに予測可能な投資収益率(ROI)を提供できるかをご検討ください。



