




、マハーラーシュトラ州 – 4 MW 太陽光発電所")
GLYDE
Fully autonomous waterless cleaning with patented dual-pass airflow and microfiber for fixed and seasonal-tilt utility plants.
ユーティリティ規模向けピック&プレース太陽光清掃ロボット
95%+
ワンパスでゴミを除去
39kg
ポータブルなピックアンドプレースシャーシ
3km
一充電あたりの走行距離
Background: Project Deneb, Sonar Bangla太陽光発電所導入事例: 1.4 MW水不要型太陽光パネル清掃ロボットプロジェクト
Taypro HELYXはピック&プレース型の半自動ソーラーリネル清掃ロボットであり、ユーティリティ規模の太陽光設備向けに開発されています。2時間未満で1 MWの太陽光発電所を清掃でき、清掃頻度向上によりソーリング損失を抑え発電量を大きく改善します。
製品の概要

Taypro HELYX, 半自動ソーラーパネル清掃ロボット、ユーティリティ規模向けピック&プレース無水清掃機
Loading 360° view... (0/51)
逆回転PBTブラシを使用したピックアンドプレイス水なし洗浄、2人でリフト&シフトできるコンパクトなシャーシ、実用規模の太陽光発電所での現場実証済みの導入。

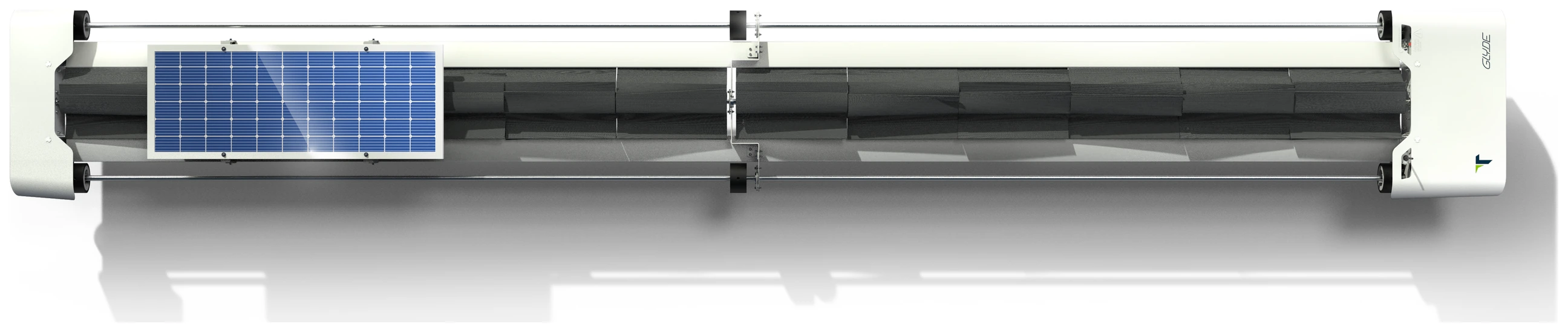
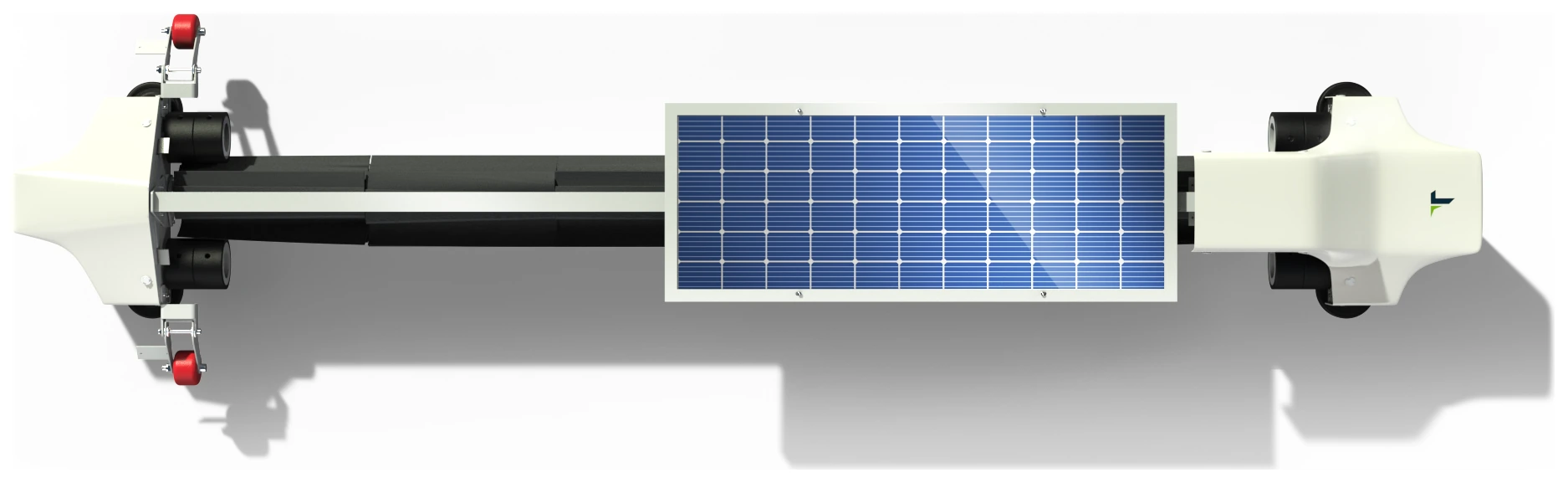
逆回転する PBT ブラシ アセンブリを備えた HELYX の上面図。

無水 PBT ブラシ クリーニング ヘッドを強調した側面図。

列間を手動でリフトアンドシフトできるように設計されたコンパクトなシャーシ。

シングルパスダスト除去のためのブラシドライブとフレームの詳細。

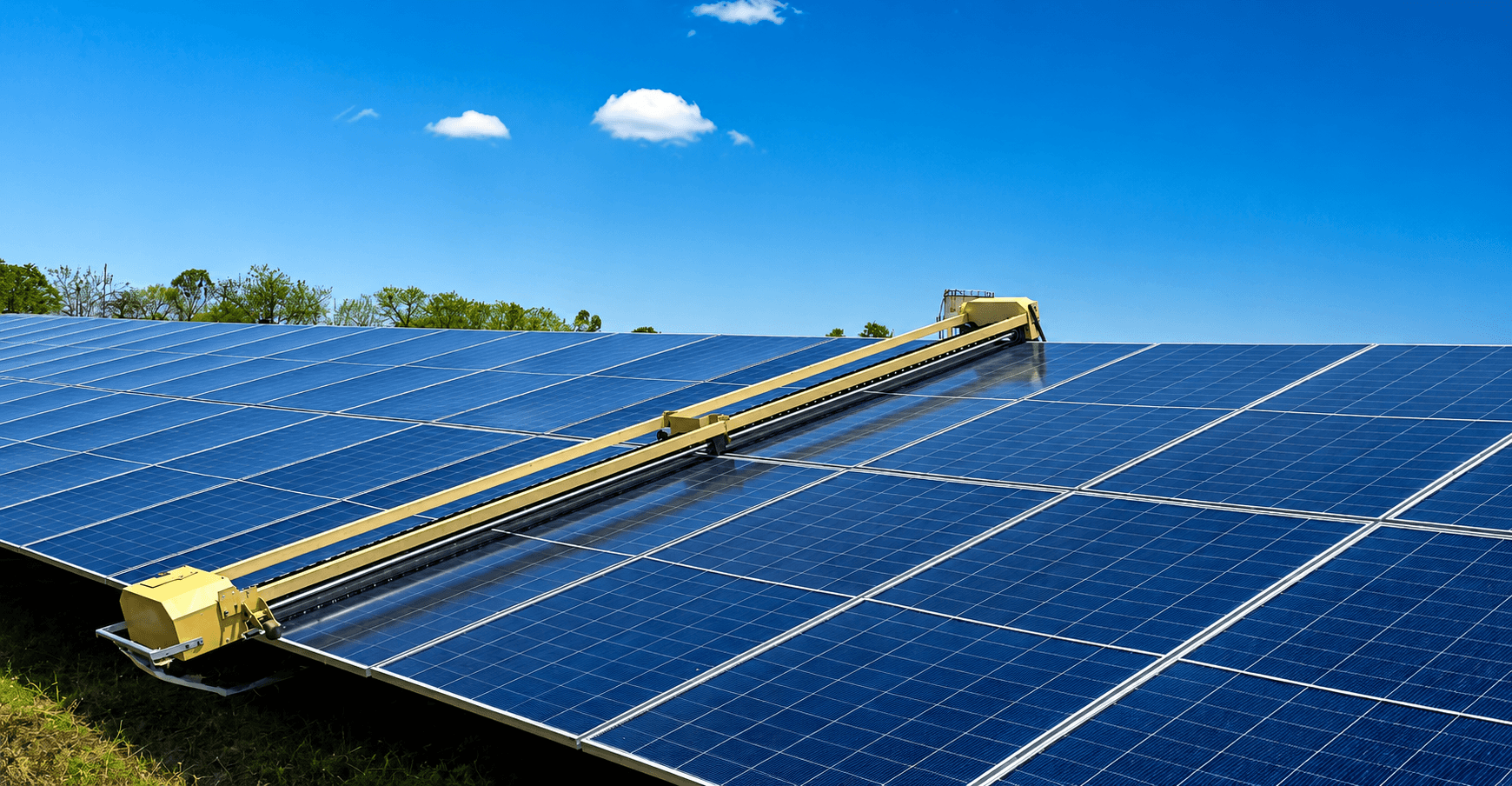
HELYX は、現場の実用規模のソーラー パネルに導入されています。
お手伝いします

| 仕様 | 値 |
|---|---|
| 洗浄方法 | 水なし、シングルパス |
| 洗浄剤 | UV 安定性 PBT ブラシ |
| 洗浄速度 | 10 ~ 15 メートル/分 |
| 最大動作範囲 | 最大 3 km |
| 推奨動作範囲 | 1.6 km |
| 動作モード | 半自動 (手動展開) |
| バッテリー技術 | リチウムイオン |
| 全体の寸法 | 750mm×4800mm |
| 動作重量 | 39kg |
| デザインライフ | 20年 |
| 耐食性クラス | C3 |
| IP保護等級 | IP65 |
| 耐風性(動作時) | 40 km/時間 |
| 耐風性(ドッキングステーションにて) | 180 km/時間 |
| 最大モジュールうねり | +20 mm (UVPBT) |
| 最大モジュール傾斜 | 45° |
| 最大東西地形勾配 | 15° |
| 最高動作温度 | 90℃ |
| 基準 | 手動清掃 | Taypro HELYX |
|---|---|---|
| 清掃頻度 | 週次または隔週(天候依存) | 2 人チームによる毎日または隔日サイクル |
| 水使用量 | モジュールあたり1洗いで1.5〜3リットル | ゼロ - 完全に水を使わないシングルパスドライクリーニング |
| 清掃品質 | ばらつきあり、作業者依存 | 各サイクルの 1 回の自動パスで 95%以上の塵を除去 |
| 速度 | 1MWあたり数時間、日照と人員で制約 | 1 MW のプラントを 2 時間以内に清掃します |
| 労働と安全 | 大規模クルー、パネル損傷リスク、夜勤リスク | オペレーター 2 名、人間工学に基づいた 39 kg のリフト、エッジ検出による安全性 |
| パフォーマンス比への影響 | 洗浄の間に5〜25%のソーリング損失が蓄積 | 頻繁な清掃により最高の PR が維持され、植物の収量が 4 ~ 8% 向上します |
| パネル安全性 | マイクロクラック、ARC摩耗、傷のリスク | パネルに安全な UV 安定性 PBT ブラシ、ARC 保護についてラボテスト済み |
| 総保有コスト | 水・人件費・給水車・設備・ダウンタイムの継続コスト | 1 回限りの設備投資、定期的な運用費用の置き換え、20 年の設計寿命 |
| 基準 | HELYX(半自動) | GLYDE(完全自動) |
|---|---|---|
| 運転モード | 半自動、ピックアンドプレース (手動導入) | 完全に自律的で、アレイに永続的に割り当てられます |
| 最適な用途 | 複数のブロック、散在する、小規模または屋上の植物 | 毎日の清掃が必要な大規模な事業規模のプラント |
| 清掃機構 | 二重反転 UV 安定 PBT ブラシ、シングルパス | セルフクリーニング回転マイクロファイバードラム、デュアルパス |
| 清掃速度 | 10 ~ 15 m/分, 2 時間以内に 1 MW を洗浄 | 10 ~ 15 m/分, 毎日、生産時間後に実行 |
| 1充電あたりのレンジ | 最大3 km / 1.6 kmを推奨 | 1回の充電で最大3,600モジュール |
| 人員要件 | 2 人のオペレーターがアレイ間でロボットを移動 | ゼロ, インストール後に無人で実行されます |
| 設備投資プロファイル | MW あたりの設備投資が低く、オペレータ チームに合わせて拡張可能 | MW あたりの設備投資が高く、運用コストはほぼゼロ |
| 最大モジュール傾斜 | 45° | 実用規模の傾斜範囲向けに設計 |
HELYX見積依頼前に、半自動ソーラーパネル清掃ロボット の回収期間を発電所で試算してください。
計算機を読み込み中…
半自動ソーラーパネル清掃ロボットは、オペレーターが手動でソーラーパネルの列に配置し、その後その列に沿って自律的に清掃するポータブルロボット掃除機です。 Taypro HELYX は、ピック アンド プレイス、リフト アンド シフト タイプのロボットです。オペレーターは工場出荷時に取り付けられたハンドルを使用してロボットを最初の列に置き、オンボード コントロールを介して清掃サイクルを開始します。ロボットは 2 つの逆回転 UV 安定性 PBT ブラシを使用して、1 回のパスでモジュール表面から 95%以上の塵を掃き取ります。列が完了すると、オペレーターは Taypro のブリッジ キットを使用するか、リフト アンド シフトによってロボットを次の列に移動します。
GLYDE は、特定のアレイに永続的に割り当てられ、人間の介入なしで毎日の清掃サイクルを実行する完全自律型ロボットです。労働力がボトルネックとなっている大規模な事業規模のプラントに最適です。 HELYX は、複数のアレイにわたって少人数の 2 人チームによって操作される半自動ピック アンド プレイス ロボットです。アレイごとのロボットの設備投資が正当化されない、分散した不規則な小規模プラントや屋上プラントに最適です。どちらのロボットも水を使わず、AI 駆動で、同じ Taypro コンソール ポータルから管理されます。
1 つの HELYX で、2 時間以内に約 1 MW の太陽光発電容量を浄化できます。これは、プラントのレイアウト、列間の距離、オペレーターのワークフローに応じて、シフトあたり数 MW に相当します。ほとんどの半自動展開では、複数の HELYX ユニットを並行して使用して、毎日または隔日の清掃サイクルで実用規模のプラントをカバーします。
No. Taypro HELYX は、100% 水を使わないソーラー パネル クリーニング ロボットです。これは、単一のドライパスでモジュール表面から塵を物理的に持ち上げて掃き出す、一対の逆回転する UV 安定性 PBT ブラシを使用しており、水の消費量、洗剤のコスト、流出汚染、給水タンカーの物流を完全に排除します。
はい。 UV 安定性 PBT ブラシ システムは、パネルに安全で摩耗しないように設計されています。すべてのロボットは、認定された太陽光発電分野の試験機関によって、毎日の清掃サイクルをシミュレートして、微小亀裂の形成、光反射率の損失、ARC の保存について個別にテストされます。 HELYX は、IP55 保護に関して TÜV NORD 認定も受けており、湿熱および乾熱性能についても検証されています。
HELYX は、固定傾斜、季節傾斜、および水平単軸トラッカー プラント向けに構築されています。モジュールの最大 45 度の傾斜と最大 15 度の東西の地形傾斜をサポートしており、ほとんどの実用規模、商業および産業の屋上、および地上設置の設置と互換性があります。専用の単軸トラッカー プラントの場合は、GLYDE-X をお勧めします。完全自律型の大規模実用規模プラントの場合は、GLYDE をお勧めします。
HELYX 半自動ソーラーパネル清掃ロボットの価格は、ユニット数、プラントのレイアウト、ブリッジキットの要件、AMC の範囲によって異なります。 HELYX により、定期的な水、人件費、タンカーのコストが 1 回の設備投資で置き換えられるため、ほとんどのお客様は迅速な回収を達成できます。サイト固有の見積もりと詳細な ROI 計算については、当社のチームにお問い合わせください。
たった2つ。工場で取り付けられた人間工学に基づいたハンドルを備えた 39 kg の最適化された重量により、コンパクトな 2 人体制の現場チームが、フォークリフト、クレーン、または重機を使用せずに、複数のアレイにわたって HELYX を持ち上げ、配置、操作、再配置することができます。オペレーターは専門的なトレーニングを必要としません。オンボード制御はあらゆる現場担当者向けに設計されています。
はい。 HELYX は、過酷なインドの事業規模の現場条件に合わせて設計されています。最高動作温度 90°C、IP65 定格の密閉エンクロージャ、TÜV NORD 認定の IP55 保護、および 10 g/m² の砂負荷で年間 12 回の模擬砂嵐サイクルの下で現場で検証されています。ロボットは最大 40 km/時間の風で掃除でき、最大 180 km/時間までドッキング ステーションにしっかりとロックされます。
すべての HELYX 展開は、Taypro のインド全土サービス モデルによってサポートされています。つまり、インドのどこでも、事前にスケジュールされた予防および是正メンテナンス、インシデント通知時の即時リモート診断、同日オンサイト故障解決目標が提供されます。長期運用には年間保守契約 (AMC) をご利用いただけます。
GLYDE
Fully autonomous waterless cleaning with patented dual-pass airflow and microfiber for fixed and seasonal-tilt utility plants.
GLYDE-X
Autonomous waterless robot for single-axis trackers with patented dual-pass microfiber and a flexible 360° bridge.
NYUMA
Fully autonomous waterless cleaning with single-pass PBT brush technology for fixed and seasonal-tilt utility-scale plants.
