Cleaning robots on single-axis trackers fail for boring civil reasons: a cable tray installed too low, a turn radius drawn for manual crews but not robot trailers, or wind rules nobody documented before the fleet arrived. Indian EPC teams that treat site prep as a commissioning afterthought spend year two arguing about partial row coverage while PR bleeds on untouched blocks.
This guide lists what to survey and specify before automatic cleaning on tracker utility plants in India: clearance, roads, docking, communications, and handover documents O&M will need when May dust arrives.
Quick answer
- Survey every tracker row for robot traverse clearance at stow, not only at midday.
- Design roads and turn radii for robot transport and night operation windows.
- Document wind/stow interlocks with tracker and robot OEMs in writing.
- Place docks/chargers off main generation rows but reachable within SLA.
- Hand over as-built maps before practical completion, not after first storm.
Why tracker geometry differs from fixed-tilt prep
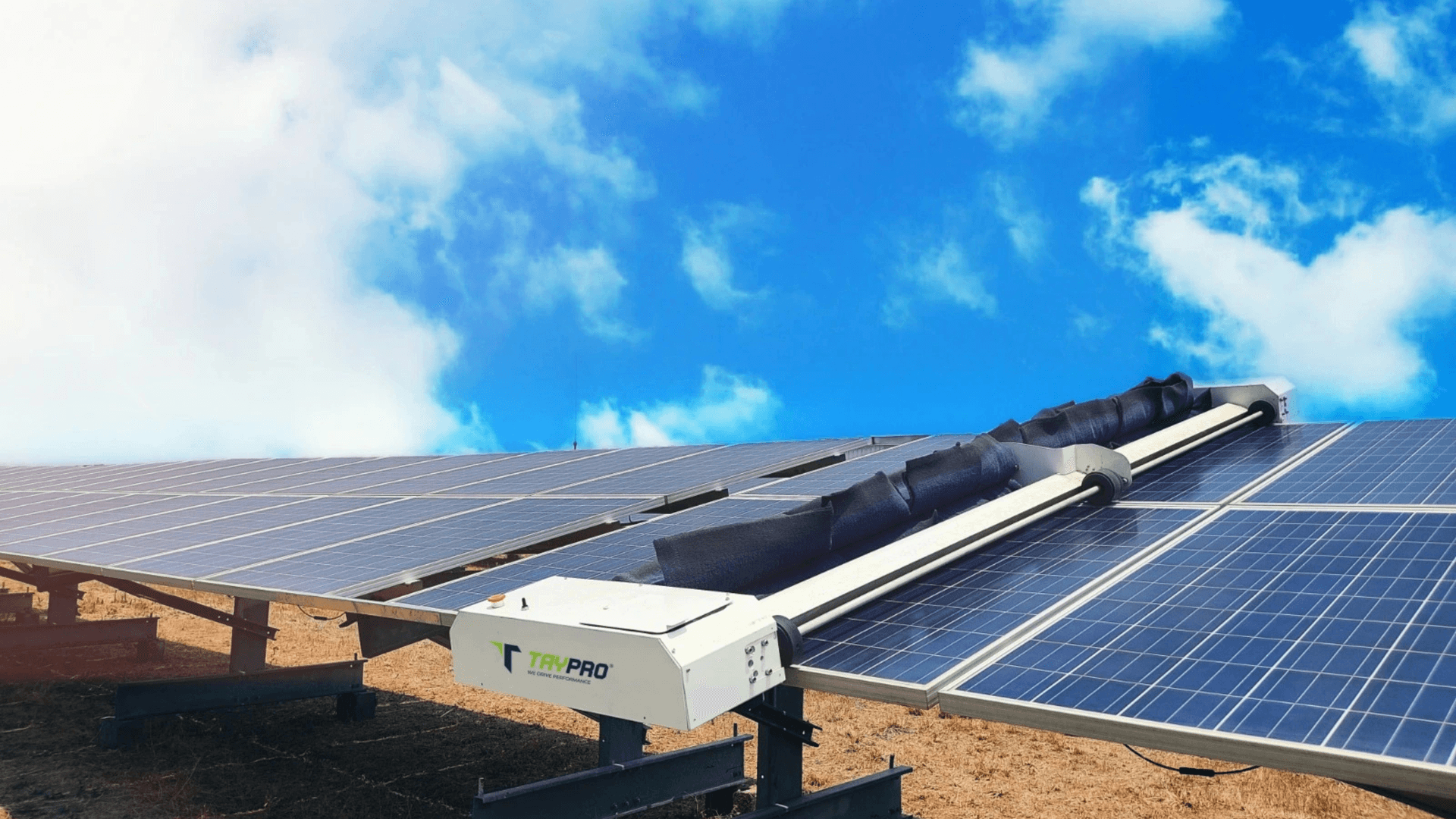
Fixed-tilt tables allow predictable brush paths. Trackers move: stow angles change ground clearance, long rows amplify small obstacles, and drive gaps at row ends must fit turning robots or manual repositioning labor returns. A 50 MW tracker block with 400 m rows punishes millimetre errors that fixed-tilt sites forgive.
Compare context: tracker vs fixed-tilt robotic cleaning challenges.
Pre-design survey checklist
| Item | What to verify | Common failure |
|---|---|---|
| Stow clearance | Robot height vs module at night stow | Hits frame or flexes glass |
| Row ends | Turning radius, motor housing | Robot cannot complete row |
| Cable trays / combiners | Height above ground path | Abort every pass |
| Vegetation zones | Growth at row edges | Seasonal blockage |
| Internal roads | Width, surface, slopes | Cannot mobilize fleet |
| Substation fences | Gate access for night crews | Delayed storm response |
Roads, logistics, and block layout
Robot fleets need repeatable mobilization from dock to block within storm SLAs. Narrow levee roads between tables, unfinished gravel with deep ruts, or shared access with farmer traffic block night passes. EPC should specify minimum road width and turning pockets at block headers in the same drawing set as inverter placement.
On Rajasthan and Gujarat greenfield sites, dust on unfinished roads slows convoys during pre-monsoon surges. Surface roads before robot pilot, not after lender complaints.
Wind, stow, and safety interlocks
Tracker OEMs publish wind stow limits. Robot vendors publish operating wind ceilings. Site prep reconciles both: who aborts first, how control room gets alarms, and whether partial rows may complete before plant-wide stow. Document abort logs requirements in the O&M contract.
Night cleaning often aligns with stowed modules, but only if robot OEM and tracker OEM agree on clearance at that angle. Pilot on worst-case rows, not demo rows near the substation.
Docking, power, and communications
Docks need power for charging, shelter from dust where batteries degrade, and security from theft. Mesh or LTE backhaul must reach row ends; prep includes gateway placement survey, not guessing after install.
Read fleet communications on utility sites and robot deployment steps.
Module OEM and method approval
Site prep includes paperwork: written module cleaning approval for the specific robot brush and pressure regime on your SKU. Without it, warranty defense fails even if robots traverse perfectly. Store approval with as-built pack.
Illustrative EPC cost of late prep (10 MW tracker block)
| Late issue | Illustrative cost impact |
|---|---|
| Retrofit cable tray raises | ₹15–40 lakh + outage windows |
| Road widening after COD | ₹8–20 lakh civil work |
| Season of partial coverage | ₹30 lakh–1 crore MWh at ₹3.50/kWh |
Numbers are illustrative for IC conversations, not quotes.
Pilot rows before fleet PO
- Select longest, obstacle-heavy rows in each block.
- Run robot traverse at stow with pass logging.
- Record abort causes and fix civil issues.
- Re-run until row completion exceeds agreed threshold.
- Sign handover only after reference rows pass.
What should EPC deliver at handover?
As-built CAD or GIS with row IDs, obstacle annotations, approved cleaning method letter, wind interlock settings, dock locations, and pilot pass logs. O&M should not discover blocked rows during the first May haboob.
Key takeaways
- Tracker cleaning prep is civil and mechanical design, not a robot brochure.
- Survey at stow, at night, on longest rows.
- Align wind rules between tracker and robot OEMs before COD.
- Pilot traversal beats desktop clearance assumptions.
Freeze robot path as-builts in the handover pack before the defects period ends. Vegetation and cable tray changes in year two should trigger re-survey, not silent partial coverage.
Related resources
Frequently asked questions
Validate end-of-row turning, stow clearance, cable tray heights, internal road width, docking/charging locations, and wind interlock rules with tracker and robot OEMs before COD. As-built surveys should mark obstacles that block night passes.
During detailed design, not after commissioning. Retrofitting clearance on energized tracker rows costs more than specifying robot paths at 30% design when row geometry is still flexible.
Robots often run at night when modules are stowed. Site prep must document stow angles, minimum ground clearance, and maximum wind speed for operation. Abort thresholds should be agreed with asset management before fleet PO.
Transport paths between blocks need width for robot trailers and service vehicles. Tight turns at row ends cause missed rows or manual repositioning that defeats automation economics on 50 MW+ sites.
As-built row maps, obstacle list, approved cleaning method letter from module OEM, wind/stow interlock settings, and photos of reference rows that passed pilot traversal.