Quick answer: Deploying the Taypro Helyx robot at scale
Implementing a waterless cleaning solution requires strategic alignment with your current O&M schedule to ensure that power generation gains outweigh the initial integration effort. For asset owners managing 5MW+ sites, the Helyx robot offers a versatile, semi-automatic approach to managing soiling-induced losses without the need for fixed infrastructure on every individual row.
- Target sites: Optimized for 5MW+ utility-scale installations with single-axis tracking systems.
- Deployment timeline: Typically 7–10 days for site mapping and initial unit calibration per 50MW block.
- Operational threshold: Recommended for sites experiencing >3% PR loss due to soiling; cleans without water requirements.
- Hardware readiness: Requires defined parking stations at row ends and unobstructed cable management for docking.
How does the Taypro Helyx robot integrate with existing tracker infrastructure?

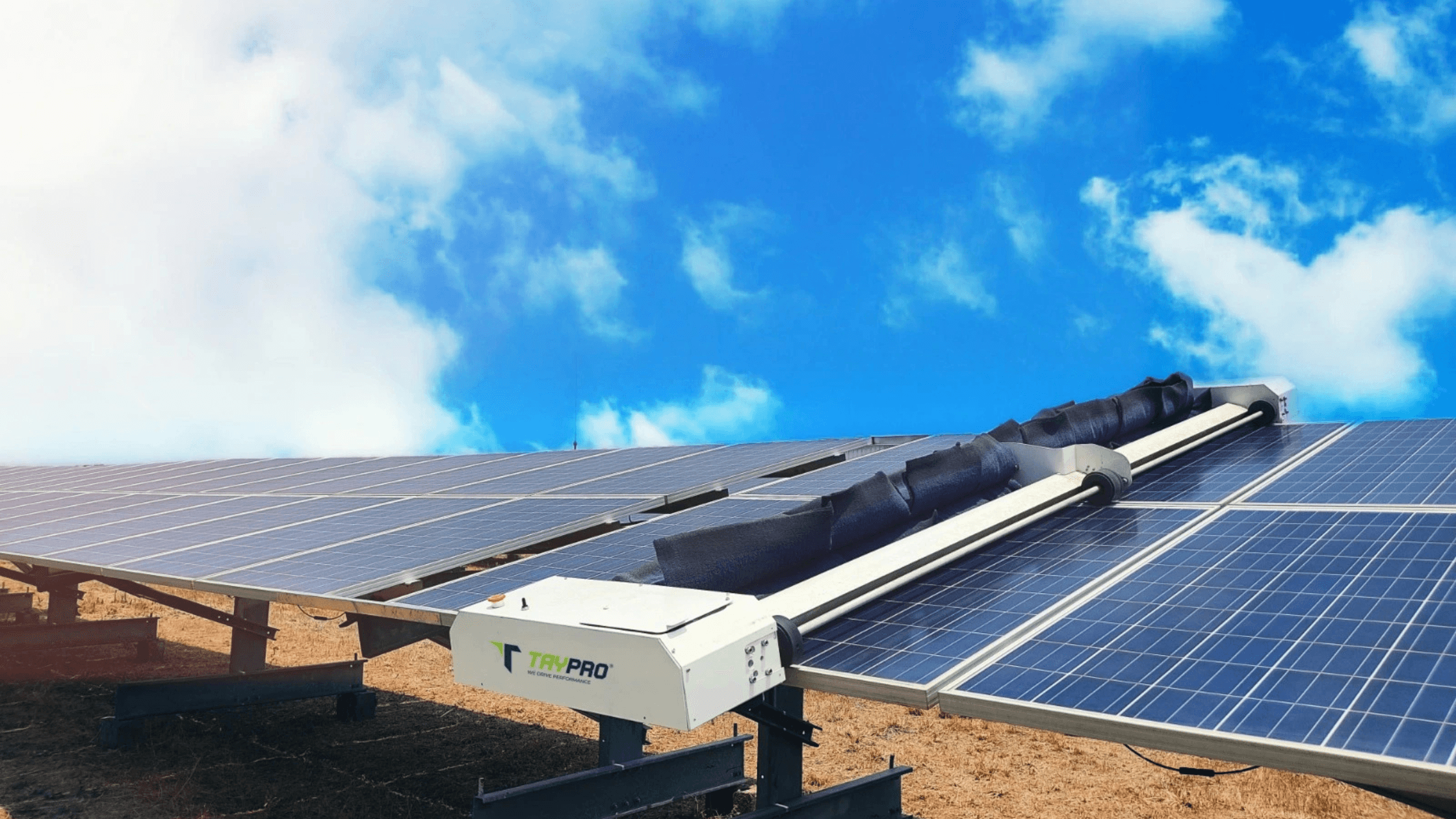
The technical integration of the Taypro Helyx robot into a utility-scale plant relies on its compatibility with the specific geometry of horizontal single-axis trackers. Unlike stationary cleaning machines, the Helyx is designed to maneuver across tracker tables by leveraging the mechanical tolerances of the module array, ensuring that the robot maintains constant brush contact while navigating varying tilt angles. For plant managers, this means the deployment does not require structural modifications to the tracker torque tubes or drive systems.
During the integration phase, the Helyx docks at the end of a tracker row. The robot's PBT brush mechanism is calibrated to align with the module surface, accounting for the slight elevation changes that occur as the tracker tracks the sun. Because the Helyx operates via a pick-and-place methodology, it provides a unique operational benefit: the ability to service multiple scattered blocks within a 5MW+ site using a centralized deployment team. This flexibility allows operators to prioritize cleaning cycles based on real-time performance data from calculating your plant ROI, targeting the rows with the highest soiling accumulation first.
Docking and cycle-time efficiency are the primary drivers of success for this deployment. The Helyx is engineered to dock securely within the inter-table gaps, allowing for a rapid transition between rows during the cleaning window. In utility-scale India deployments, we typically observe a cleaning speed of 10–15 metres per minute, which, when combined with optimized battery management, allows for a range of up to 3km per charge. By maintaining a consistent brush pressure, the system ensures that the Anti-Reflective Coating (ARC) on your modules remains protected, a critical requirement for maintaining warranty compliance as detailed in our solar panel maintenance checklist. Operators must ensure that site SCADA systems can communicate with the Helyx deployment team, allowing them to adjust tracker angles to the horizontal cleaning position during scheduled maintenance windows, thereby maximizing the robot's cycle time and reducing the overall number of manual interventions required on-site.
Pre-deployment site assessment and hardware readiness
Before the arrival of the Taypro Helyx robot on-site, a structured assessment of the physical layout is required to ensure seamless integration. For a 5MW+ site, the primary objective is to verify that the robot’s footprint matches the physical constraints of your tracker arrays. This starts with a review of the inter-table gaps and the clearance at the end of each row. Because the Helyx is a pick-and-place solution, it does not require a permanent docking station at every row end; however, it does necessitate level, obstruction-free surfaces at the access points where the team will manually move the unit from one row to the next.
Hardware readiness also extends to the electrical and mechanical state of the tracker drive systems. Since the Helyx relies on the tracker being positioned in a horizontal orientation during the cleaning cycle, your O&M team must verify that the tracker control software can reliably execute a horizontal tilt command across the entire field without motor errors. A common pre-deployment task is to conduct a ‘dry run’ of this positioning on a single test block. During this phase, you should verify:
- Obstruction mapping: Identify potential interference points such as DC cable loops or string monitoring boxes that hang below the torque tube.
- Surface uniformity: Ensure the inter-row pathways are sufficiently compacted to support the movement of the pick-and-place equipment and the support team.
- Connectivity zones: Map out the site to confirm that your field team has adequate signal coverage for reporting and performance tracking back to the central O&M office.
By preparing these factors, you minimize the downtime associated with manual adjustments during the actual cleaning campaign. This setup allows your solar panel maintenance checklist to incorporate the robotic cycle as a predictable, standard operating procedure rather than a reactive task.
Step-by-step workflow for commissioning on 5MW+ blocks
Commissioning the Taypro Helyx robot at a utility-scale plant follows a standardized workflow designed to scale with your capacity. For 5MW+ installations, we recommend a phased approach that treats the plant as a series of manageable blocks, usually aligned with the electrical string groupings or tracker row clusters. This allows your team to maintain energy output while the robot progresses through the field.
The commissioning workflow typically proceeds in four distinct stages:
- Site Baseline Mapping: Before cleaning begins, calibrate the Helyx sensors to the specific module dimensions of your solar plant ROI targets. This ensures the single-pass PBT brushes maintain optimal contact pressure without over-stressing the module glass.
- Deployment Training: Your on-site personnel are trained in the pick-and-place procedure, which includes securing the robot on the array, initiating the cleaning cycle via the interface, and managing the transit between rows. Safety is the primary focus here, with an emphasis on fall prevention and the correct handling of the 39 kg unit.
- Pilot Row Validation: Run the robot through three to five rows to observe the cleaning efficacy and mechanical behavior. During this stage, pay close attention to the brush contact at the start and end of the row, as well as the transition points between individual modules.
- Full-Block Scheduling: Once the pilot phase is cleared, initiate the full 5MW cleaning schedule. Use the NECTYR fleet portal to track progress and identify rows that require a second pass if extreme soiling levels are detected.
Following this systematic approach ensures that you avoid the common pitfalls of uncoordinated manual labor. By treating the robotic cleaning as a data-driven mission, plant managers can precisely control the operational expenditure and ensure that every square meter of your 5MW+ site receives uniform attention. This methodology protects the longevity of your hardware and provides the clean panel surface needed to hit your plant’s peak performance ratio targets throughout the year.
Communication protocols and sensor calibration
To successfully integrate the Taypro Helyx robot into a 5MW+ site, the link between the field deployment team and the central O&M office is as vital as the mechanical performance itself. Reliable data transmission prevents the 'blind' operation that often plagues large-scale solar projects. The Helyx system utilizes an integrated communication module designed to bridge the gap between remote row locations and your existing plant monitoring infrastructure.
Before initiating a full cleaning campaign, you must calibrate the robot sensors to the environmental variables of your specific site:
- Soiling Intensity Baseline: Calibrate the onboard sensors based on the local dust density found in regions like Rajasthan or Gujarat. This allows the Helyx to adjust its transit speed and brush pressure to match the severity of the soiling, rather than relying on a static, inefficient speed.
- Tilt-Angle Synchronization: If your plant utilizes single-axis trackers, ensure the NECTYR fleet portal is synchronized with the tracker SCADA system. This ensures that the robot receives the correct 'tilt-to-home' or 'clean-position' signal without human intervention, reducing the risk of motor-torque errors or alignment drift.
- RF Mesh Validation: In large-scale utility sites, ensure that the mesh network coverage extends to the furthest corners of the field. A routine signal sweep during the commissioning phase will identify any dead zones where the robot might lose connection with the fleet manager, which could lead to incomplete logs or delayed status reporting.
Integrating these protocols transforms your solar panel maintenance checklist from a reactive, paper-based process into a digital-first operation. By maintaining constant communication, plant managers can see real-time progress on a row-by-row basis, allowing for dynamic tasking if a specific section of the plant experiences a sudden dust storm or localized heavy soiling.
Maintaining module safety and warranty compliance during deployment
The primary concern for any utility-scale asset owner is the protection of the PV modules, particularly regarding the anti-reflective coating (ARC) and the long-term integrity of the glass. When deploying the Taypro Helyx robot, safety and warranty compliance are baked into the operational methodology. Unlike manual cleaning, which can involve abrasive brushes or uncontrolled water usage, the Helyx uses specialized, single-pass PBT brush technology engineered to minimize friction while maximizing debris removal.
To ensure compliance with module manufacturer warranties during deployment, follow these safety-first operational protocols:
- Controlled Contact Pressure: The Helyx is designed to maintain a consistent contact pressure that falls well within the safety thresholds set by major Tier-1 module manufacturers. During the initial commissioning, perform a test-run on a sample module to ensure that the brush engagement does not exceed the allowed structural load specifications.
- Material Compatibility: Using UV-stable PBT brushes ensures that the cleaning medium remains rigid enough to clear dust but soft enough to avoid micro-scratching the module surface or degrading the ARC layer over time. Avoid generic, stiff-bristled alternatives that have not been tested for utility-scale glass durability.
- Edge-Aware Navigation: The Helyx includes advanced obstacle detection sensors that prevent the robot from colliding with string edges, mounting hardware, or junction boxes. These sensors are vital for protecting both the robot’s mechanics and the module frame from physical damage during the cleaning pass.
- Waterless Operational Integrity: By eliminating water-based cleaning, you remove the risk of mineral deposits (hard water scaling) and thermal shock-induced micro-cracks in the modules. This is particularly critical in arid regions where water quality varies and traditional wet cleaning can inadvertently reduce energy yield over time.
By strictly adhering to these protocols, you protect your solar plant ROI by preventing premature module degradation. Furthermore, having a systematic, machine-driven process provides an auditable record of your O&M activities. This documentation is invaluable during warranty claims, as it demonstrates that your site maintenance was performed according to professional, manufacturer-approved specifications, rather than haphazard manual methods that are often flagged during audits.
Key takeaways for plant managers
Integrating the Taypro Helyx robot into your utility-scale O&M strategy requires a disciplined approach to site logistics and performance monitoring. By focusing on the following technical pillars, you ensure that your investment in autonomous cleaning drives measurable gains in your plant's performance ratio while maintaining site safety and equipment integrity:
- Prioritize Pre-Deployment Surveys: Before rolling out the Taypro Helyx, conduct a site-wide assessment of tracker tilt ranges and ground stability. For plants exceeding 5 MW, ensure that the pathing between tracker rows is cleared of debris and vegetation that could interfere with the robot’s semi-automatic, pick-and-place deployment cycle.
- Standardize Communication Protocols: Use the NECTYR fleet management portal to track the robot’s cleaning progress and battery health in real time. Consistent, data-driven scheduling prevents the "over-cleaning" of modules, which can unnecessarily accelerate brush wear, and ensures your team only cleans rows that have hit your defined soiling loss threshold.
- Enforce Module Safety Compliance: To maintain manufacturer warranties, use only UV-stable PBT brush variants that match the specific glass properties of your PV modules. Ensure that your O&M team follows the prescribed contact pressure settings to avoid micro-scratching or mechanical stress on the modules during operation.
- Data-Backed Decision Making: Treat each cleaning cycle as a data point. By logging the correlation between cleaning frequency, local environmental conditions (such as seasonal dust storms in Rajasthan or coastal humidity in Gujarat), and your energy generation metrics, you can refine your solar panel maintenance checklist to optimize for both yield and OPEX efficiency.
- Training and Documentation: Ensure that your on-site technicians are fully trained in the safe deployment of the Helyx unit. Maintaining a clear, auditable trail of maintenance logs, as recommended when calculating solar plant ROI, will provide necessary proof of care for future warranty claims or asset audits.
By shifting from ad-hoc manual labor to a structured, technology-led deployment, you transform your O&M strategy from a cost center into a performance driver. A successful rollout is not just about the equipment; it is about the operational discipline you build around the solar panel cleaning system you choose to deploy.
Frequently asked questions
Implementing a waterless cleaning solution requires strategic alignment with your current O&M schedule to ensure that power generation gains outweigh the initial integration effort. For asset owners managing 5MW+ sites, the Helyx robot offers a versatile, semi-automatic approach to managing soiling-induced losses without the need for fixed infrastructure on every individual row.
To ensure hardware readiness, sites must establish defined parking stations at the ends of tracker rows. Additionally, you must clear the area of debris to provide unobstructed cable management for docking. Since the robot uses a waterless cleaning process, no complex plumbing infrastructure is required, keeping your site preparation costs low while maintaining compatibility with existing tracker geometry.
Yes, the Taypro Helyx robot is engineered to maintain constant, gentle brush contact with the module surface while navigating the elevation changes of trackers. The cleaning mechanism is specifically calibrated to preserve module integrity and anti-reflective coatings. By removing soiling without the use of water or abrasive chemicals, the system effectively restores performance without risking long-term physical damage to your solar assets.
Cleaning schedules are synchronized by analyzing site performance data to identify rows with more than 3% power ratio loss due to soiling. Plant managers use this real-time feedback to deploy the robot to the most affected sections first. This data-driven approach maximizes the ROI of your O&M activities by focusing resources on the blocks that provide the highest immediate gain in energy production.