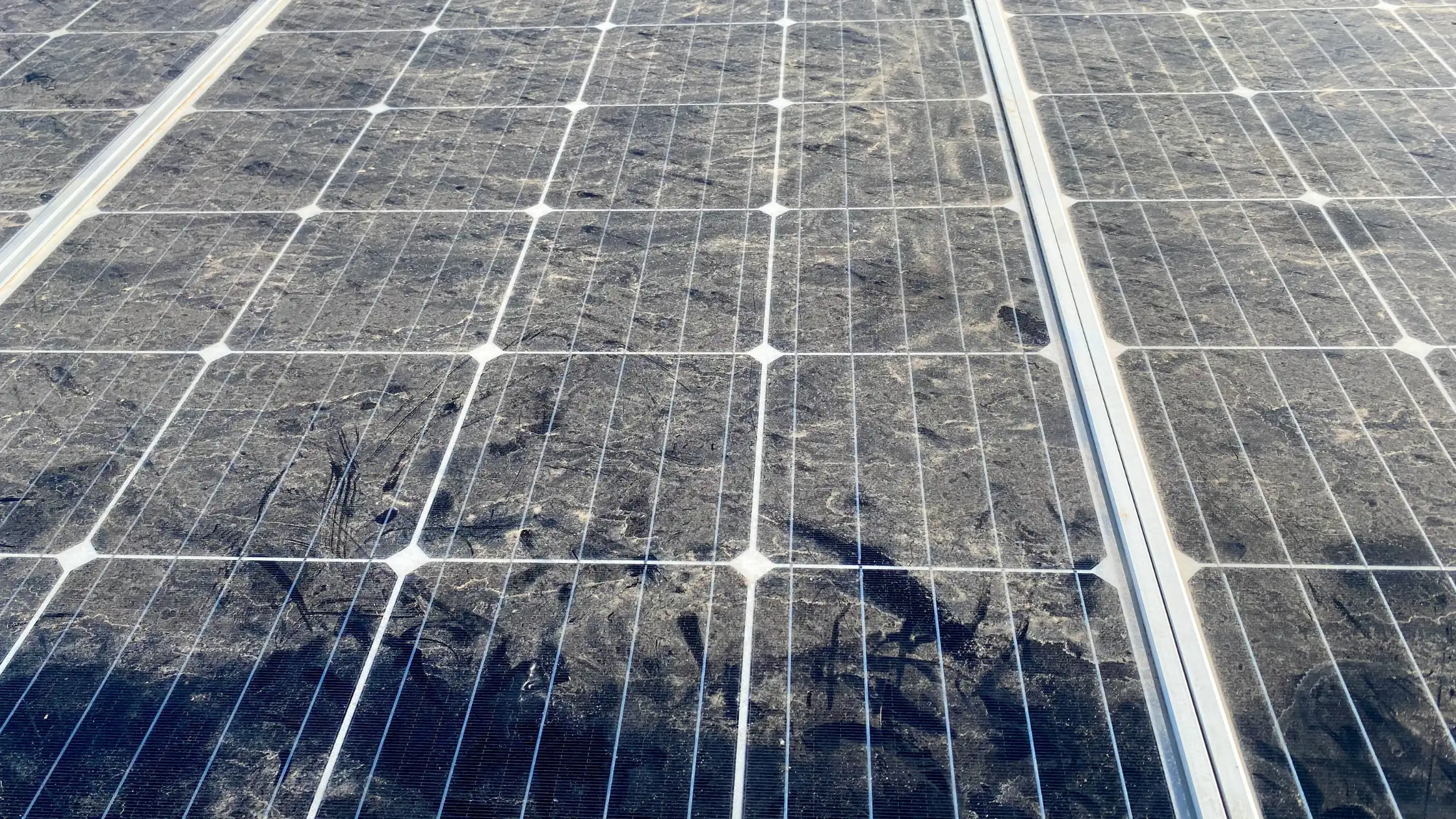
ソーリング(汚れの蓄積)は、あらゆるメガソーラー発電所において制御可能な損失の中で最大要因となっています。インドだけでも、埃、鳥の糞、産業用粒子状物質によって、年間発電量の8–30%が静かに失われています。2026年現在、その解決策はもはや給水車と作業員ではありません。それは、あなたが眠っている間にすべての列を清掃する、自律型の水を使わないロボットです。本ガイドでは、インドおよび世界のメガソーラー事業者向けにランク付けされた、2026年の主要な太陽光パネル清掃ロボットを比較します。
項目 | 数値 |
|---|---|
ソーリングによる年間発電損失(インド) | 8–30% |
2033年までの世界ソーラー清掃ロボット市場規模 | 16.7億ドル |
Tayproロボットによる年間節水量 | 7億リットル以上 |
一般的なロボットの投資回収期間 | 18–36ヶ月 |
2026年、なぜ太陽光パネル清掃ロボットが重要なのか
太陽光発電業界は転換期を迎えています。世界の太陽光発電容量は2023年までに1,419 GWに達し、2021年から73%増加しました。インドは現在、世界トップ3の太陽光発電市場の一つです。しかし、規模の拡大は人手による運用では解決できない問題、すなわちソーリングをもたらしました。
埃、花粉、鳥の糞、産業用エアロゾルが、毎日パネルガラスに蓄積します。50万枚以上のモジュールを擁するメガソーラー発電所では、清掃を行うたびに性能比が低下していきます。インドのメガソーラー発電所での研究によると、特に乾燥地帯や農業・産業環境では、極端な条件下でソーリングが発電量を最大30%低下させる可能性があります。
「年間約150万ユニットを発電する1 MWの地上設置型太陽光発電所において、3%のソーリング損失だけで毎年4万5000ユニットもの発電損失が生じる」、pv magazine India, 2026年4月
1 kWhあたり3ルピーと仮定すると、ソーリングにより5%の損失が出ている100 MWの発電所では、年間2億ルピー以上の発電収益を失っていることになります。適切なロボットフリートを導入すれば、この金額を継続的に回収可能です。
人手による清掃の限界
従来の清掃クルーには、運用の規律だけでは完全には解決できない根本的な制約があります:
水不足。 ラジャスタン州、グジャラート州、アーンドラ・プラデーシュ州、テランガーナ州といったインド最大の太陽光発電回廊は、国内で最も水不足が深刻な地域の一つです。大規模な発電所を水洗いすると、年間数百万リットルの水を消費します。
頻度の制限。 作業員による清掃は通常年4–8回であり、平均年間効率は約85%に留まります。毎晩清掃を行うロボットシステムなら、これを99%以上に引き上げることが可能です。
労働リスク。 高所作業や極度の高温下での作業は、発電事業者にとって安全上のリスクと法的責任を伴います。
データ記録の欠如。 手作業による清掃では、どの列がいつ、どの程度徹底的に清掃されたかという体系的な記録が残らず、O&Mの最適化は不可能です。
世界の太陽光パネル清掃ロボット市場は、2025年に5.2億ドルと評価され、年平均成長率14.65%で成長し、2033年には16.7億ドルに達すると推定されています。インドは、新・再生可能エネルギー省(MNRE)の指令、ロボット価格の下落、IPP(独立系発電事業者)の運用洗練化により、最も急速に成長しているセグメントです。
2026年の太陽光パネル清掃ロボットの評価方法
特定の製品を検討する前に、優れたロボット投資と高価な失敗を分ける6つの基準を紹介します。
1. 発電所タイプへの適合性
固定傾斜型および季節調整傾斜型の発電所には、ほとんどの清掃ロボットが対応しています。インドの大規模プロジェクトで増加している単軸トラッカー型発電所には、トラッカー列間の傾斜移動を可能にする柔軟なブリッジを備えた、根本的に異なるロボットアーキテクチャが必要です。トラッカー型発電所に固定傾斜用のロボットを購入するのは、よくある高額なミスです。
2. 清掃方法:乾式か湿式か
インドの太陽光発電ベルトの大半のような水不足地域では、水を使わない乾式清掃が望ましいだけでなく、唯一の商業的に実行可能なアプローチであることが多いです。 水インフラを一切必要とせず、水洗いと同等の清掃効率を実現する多段式乾式システム(エアフロー+マイクロファイバー接触)を探してください。
3. 自律性のレベル
完全自律型ロボットは、ナビゲーション、ドッキング、充電、スケジュール設定をすべて自分で行います。半自動型ロボットは、作業員が列ごとに配置する必要があります。10 MW以上の発電所では、初期投資が高くても、完全自律型システムの方がTCO(総保有コスト)の観点から見て常に優れた選択肢となります。
4. 接続性とフリートソフトウェア
ソフトウェアのないロボットは、車輪付きのモップに過ぎません。最新のシステムは、すべての清掃パスをログに記録し、異常を検出し、リモート診断を可能にし、データをO&Mワークフローに取り込みます。LTE、Wi-Fi、LoRa/LoRaWAN、RFメッシュを備えたプラットフォームにより、携帯電波の届きにくい遠隔地でもロボットの接続性を維持できます。
5. アフターサポートと稼働率
インドのメガソーラー発電所では、故障時に当日中の解決が期待されています。メーカーのインド全土にわたるサービスネットワーク、スペアパーツの可用性、平均修理時間を評価してください。AMC(年間保守契約)の構造とリモート診断機能は、重要な差別化要因です。
6. TCO(総保有コスト)対 CAPEX(設備投資)
1台あたりの価格が最も安いロボットが、最も低いTCOを実現することはほとんどありません。AMC費用、予備部品、予想されるダウンタイム、ロボット1台あたりの清掃範囲、性能比の改善により回収される収益を考慮してください。稼働率99%を誇る高価格なロボットの方が、頻繁に故障する安価な代替品よりも、5年間で見れば優れた収益を生み出すことが一般的です。
CAPEX/OPEXのアドバイス: 初期資本に制限がある場合、Tayproを含む複数のメーカーが、ハードウェアのリスクを作業員が負わない「清掃パネル枚数ごとの支払い型OPEXモデル」を提供しています。CAPEX購入に踏み切る前に、真剣に検討する価値があります。
2026年版 太陽光パネル清掃ロボット トップ7
以下のロボットは、自律性、清掃効果、トラッカー適合性、ソフトウェアエコシステム、インド市場での存在感、および総保有コストに基づいて評価されています。順位は編集によるものであり、特定の発電所のニーズによって順位が変動する可能性があります。
#1 Taypro GLYDE & GLYDE-X(インド市場でベスト)
Taypro · インド製 · プネー、チャカン

GLYDEは、Tayproが提供する、固定傾斜および季節調整傾斜型メガソーラー発電所向けのフラッグシップ完全自律型ロボットです。特許取得済みの二段階マイクロファイバー清掃システムを核としています。1段階目ではエアフローがパネル表面の乾いた埃を浮き上がらせ、2段階目では精密なマイクロファイバーアレイが接触拭き取りを完了します。その結果、水を1滴も使用せず、水洗い以上の性能を実現しています。
GLYDE-Xはトラッカー最適化モデルであり、単軸トラッカーの移行をシームレスに処理する柔軟な360度ブリッジを備えています。両ロボットはNECTYRフリート運用ポータルとネイティブに統合されており、スケジューリング、ライブ監視、AMCチケット管理、清掃監査ログが可能です。インド全土の5 GWを超えるメガソーラー(Agar(MP) 250 MW、Soyegaon(マハーラーシュトラ州) 100 MW、Banda(UP州) 70 MWなど)に導入されており、GLYDEシリーズはインド市場で最も実戦で鍛えられた自律型清掃プラットフォームです。
仕様 | 詳細 |
|---|---|
清掃方法 | デュアルパス・ドライ洗浄(エアフロー+マイクロファイバー) |
対応設備 | 固定架台 + 1軸トラッカー(GLYDE-X) |
水の使用量 | ゼロ |
自律性 | 完全自動 |
フリート管理ソフトウェア | NECTYRポータル |
接続性 | LTE / LoRa / RFメッシュ |
認証 | TÜV NORD |
インド国内O&M | インド全土対応 |
強み: 特許取得済みのデュアルパス洗浄によりドライシステムとして最高の洗浄効率を実現。インド最大級のサービスネットワークを完備。NECTYRフリートソフトウェアが付属。TÜV NORD認証取得。トラッカー対応(GLYDE-X)および固定架台モデルを用意。CAPEXゼロのOpexモデルも利用可能。
検討事項: 汎用輸入製品と比較して価格はプレミアム設定。海外配送のため現地在庫製品よりも納期が長くなる場合あり。
#2 Taypro NYUMA & NYUMA-X, 自律型モデルのベストバリュー
Taypro · インド製 · プネー、チャカン
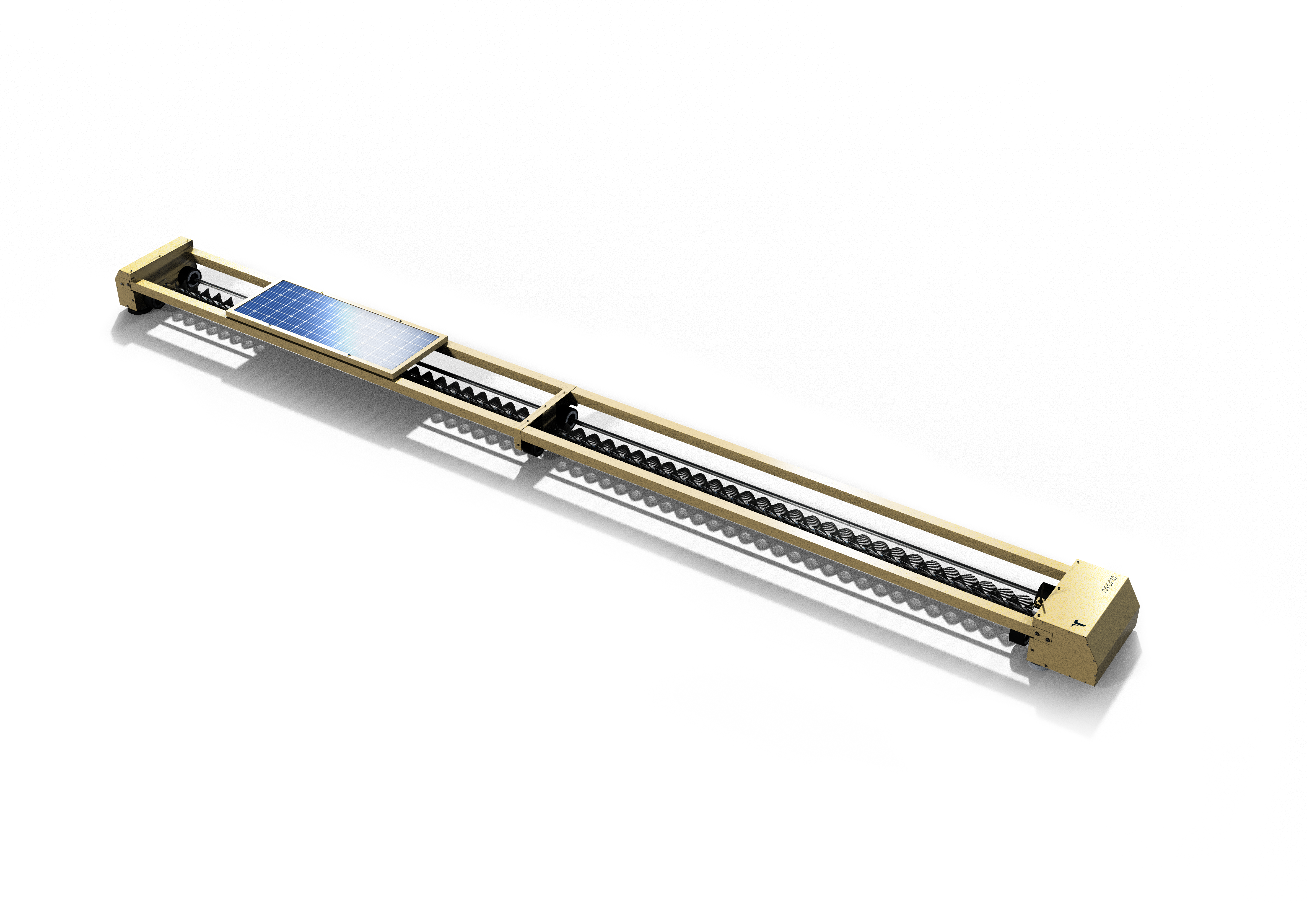
NYUMAは、固定架台および可変架台のメガソーラー向けに、完全自律型のシングルパスPBT(ポリブチレンテレフタレート)水なし洗浄を提供します。Tayproの高効率モデルであり、洗浄頻度と作業スピードが最優先される発電所に最適化されています。NYUMA-Xは同一プラットフォームを1軸トラッカーにも対応させ、柔軟な関節ボディを採用しています。両モデルともNECTYRに接続可能であり、インド国内で製造され、インド全土を網羅したAMC(年間保守契約)サポートを提供します。
仕様 | 詳細 |
|---|---|
洗浄方式 | シングルパスPBT水なし洗浄 |
対応設備 | 固定架台 + トラッカー(NYUMA-X) |
水の使用量 | ゼロ |
自律性 | 完全自動 |
フリート管理ソフトウェア | NECTYRポータル |
最適用途 | 高効率が求められる、中程度の汚れの発電所 |
強み: ロボット1台あたりのカバー範囲が広い。GLYDEと同一のNECTYRエコシステム。トラッカー対応のNYUMA-Xバリエーション。インド国内製造による迅速なスペアパーツ供給。
検討事項: ラジャスタン州のような粉塵が非常に多い地域では、デュアルパス方式に比べると洗浄力が劣る場合がある。中程度の汚れ環境に最適。
#3 Taypro HELYX, ベスト・セミオートマチック
Taypro · インド製 · プネー、チャカン

ブロックが点在する発電所や分散型発電設備、または完全自律型の投資回収(ROI)が見込めない小規模な設備向けに、HELYXセミオートマチックロボットは、特許取得済みの水なし洗浄テクノロジーを「ピック&プレース(持ち運び設置)」形式で提供します。作業員1名がHELYXを列から列へ移動させ、ロボットが自動走行してその列を洗浄します。そのため、HELYXは発電所レイアウトが不規則な場所、工場の屋根、あるいは完全自律型のフリートを導入するには小さすぎるが人手による洗浄には大きすぎる衛星ブロックに最適です。
仕様 | 詳細 |
|---|---|
洗浄方式 | シングルパスPBT水なし洗浄 |
対応設備 | 固定架台 |
自律性 | セミオートマチック(ピック&プレース) |
水の使用量 | ゼロ |
必要な労働力 | ロボット1台につき技術者1名 |
最適用途 | 点在するブロック、中小規模の設備 |
強み: 完全自律型よりも低価格で導入可能。連続していない点在するブロックでも使用可能。レールやトラックのインフラ設置が不要。インド国内150か所以上のサイトで実績あり。
検討事項: ロボット1台につき技術者1名の常駐が必要。非常に広大なメガソーラーには不向き。
#4 Ecoppia T4 & E4, 世界最高の実績
Ecoppia · イスラエル / グローバル
Ecoppiaは世界で最も導入実績のあるソーラーパネル清掃ロボットブランドであり、そのフリートは157億枚以上のパネルを清掃し、35以上の大規模サイトで18億ガロン近い水を節約してきました。T4は固定架台式メガソーラー向けの主力自律型ドライクリーニングモデルであり、E4は特定のトラッカー構成に対応するレール取り付け型の自律清掃機能を追加しています。毎晩清掃を行うEcoppiaの夜間自律稼働モデルは、パネルのパフォーマンスを最大化するための世界的なベンチマークとなっています。
仕様 | 詳細 |
|---|---|
清掃方法 | 水不使用ドライブラシ |
設置タイプ | 固定架台 + トラッカー (E4) |
水使用量 | ゼロ |
自律性 | 完全自動 (夜間稼働) |
主要市場 | 中東・北アフリカ (MENA) / グローバル |
インドのO&M | 限定的 |
強み: 最大規模のグローバル導入拠点、過酷な砂漠環境 (MENA) での実証済み実績、日中の干渉がない夜間稼働、強力なデータおよびレポートプラットフォーム。
検討事項: Tayproと比較してインド国内のサービスネットワークが限定的、インド国内の発電所における輸入コストや予備部品のリードタイムが長い、インドの多様な発電所のレイアウトには適さない場合がある。
#5 SolarCleano B1 & F1、大型屋根向けに最適
SolarCleano · スイス / グローバル
SolarCleanoは、商業・産業市場向けに2つの優れたモデルを提供しています。B1は、回転ブラシシステムを使用して平坦および傾斜したアレイを清掃する、メガソーラー向けの半自律型ロボットです。F1には、リモートコントロール機能と多彩な清掃モードが追加されています。SolarCleanoは、欧州のC&I (商業・産業) セグメントや、世界中の大規模な産業用屋根設置設備において特に高い強みを発揮します。
仕様 | 詳細 |
|---|---|
清掃方法 | 回転ブラシ / 水使用可 |
設置タイプ | 地上設置 + 屋根設置 |
自律性 | 半自動 / リモートコントロール |
主要市場 | 欧州 / C&I (商業・産業) |
インドのO&M | 限定的 |
強み: 屋根および地上設置の両方に対応する汎用性、欧州のC&Iセグメントでの実績、オペレーターの柔軟性を高めるリモートコントロールオプション。
検討事項: メガソーラー規模では完全自律ではない、水を使用するオプションは乾燥したインドでは実用的ではない、インド国内のO&Mエコシステムが限定的である。
#6 NOMADD Desert Solar Solutions、砂漠・MENA地域に最適
NOMADD · サウジアラビア
NOMADD (水を使用しない機械式自動除塵装置) は、砂漠環境や、サウジアラビアおよびMENA地域の極端な粉塵と熱のために特別に設計されました。完全に保護されたモーターを備えた特殊なブラシシステムにより、利用可能な設計の中で最も砂に強い製品の一つとなっています。インドのタール砂漠地域でロボットの導入を検討しているインドの事業者にとって、NOMADDは注目に値しますが、インド国内のサポート体制は依然として最小限です。
仕様 | 詳細 |
|---|---|
清掃方法 | ドライ機械式ブラシ |
設置タイプ | 固定架台 |
水使用量 | ゼロ |
主要市場 | MENA / 砂漠 |
インドのO&M | 最小限 |
強み: 極めて高い防塵設計、水の必要性なし、最も過酷な砂漠条件での実証済み実績。
検討事項: インド国内に有意義なサービスネットワークが存在しない、インド国内の設備に対する輸入およびサポートコストが高い、トラッカーへの対応が限られている。
#7 Bladeranger / AX System Class、革新的な選択肢
世界の多様なイノベーター
Bladeranger (ドイツ) や AX System を含むいくつかの新規参入企業は、AI駆動型の経路計画とマルチロボット協調制御の限界を押し広げています。BladerangerはAIによるカバレッジ最適化を備えたレールマウント設計を採用しており、AX Systemはモジュール式で拡張可能なIoT統合型洗浄に注力しています。TayproやEcoppiaほどの導入規模には至っていませんが、これらのプラットフォームは次世代のインテリジェントな太陽光発電O&M自動化を象徴するものであり、将来の調達サイクルに向けて注目に値します。
強み: 最先端のAI/ML統合、モジュール式かつ拡張可能なアーキテクチャ、強力な欧州の研究開発エコシステム。
検討事項: 実際の導入規模が限定的、インド国内でのO&Mサポート体制がない、インドの環境下でユーティリティスケールの実績が未検証。
比較表: 主要な太陽光パネル洗浄ロボット 2026年版
ロボット | メーカー | 洗浄方式 | 自律性 | トラッカー対応 | 水使用量 | フリートソフトウェア | インドO&M |
|---|---|---|---|---|---|---|---|
GLYDE / GLYDE-X | Taypro | デュアルパス乾式 | 完全自律 | 対応 (GLYDE-X) | ゼロ | NECTYR | インド全域 |
NYUMA / NYUMA-X | Taypro | シングルパスPBT | 完全自律 | 対応 (NYUMA-X) | ゼロ | NECTYR | インド全域 |
HELYX | Taypro | シングルパスPBT | 半自動 | なし | ゼロ | NECTYR | インド全域 |
T4 / E4 | Ecoppia | 乾式ブラシ | 完全自律 | 対応 (E4) | ゼロ | Ecoppia Cloud | 限定的 |
B1 / F1 | SolarCleano | 回転ブラシ | 半自動 / リモート | なし | オプション | 基本 | 限定的 |
NOMADD | NOMADD DSS | 乾式メカニカル | 完全自律 | なし | ゼロ | 基本 | 最小限 |
Bladeranger / AX | その他 | AI乾式 / レール | 製品により異なる | 限定的 | ゼロ | IoTプラットフォーム | 最小限 |
インドのユーティリティ向け太陽光発電市場における太陽光パネル洗浄ロボットの選定

インドの太陽光発電市場は特殊です。極度の高温、微粒子が多い環境、深刻な水不足、多様な地形、そしてGW規模のIPPポートフォリオから10 MWの州政府主導型事業に至るまで、そのユーティリティセクターは極めて独自性の高い要件を求めています。世界規模で設計された多くのロボットでは、これらの環境への対応は不十分です。
インドの発電所運営者が確認すべき重要事項
水を使わない洗浄:ラジャスタン州、グジャラート州、カルナタカ州、アーンドラ・プラデーシュ州/テランガーナ州など、インドの主要な太陽光発電拠点は事実上すべて水不足の地域です。水を使用する洗浄ロボットを大規模に運用することは現実的ではありません。
トラッカーへの対応:発電効率を15~25%向上させる単軸トラッカーは、現在、多くの新規ユーティリティプロジェクトで標準となっています。導入予定のロボットがトラッカーへの対応実績を有しているかを確認してください。
耐熱性能:ラジャスタン州やグジャラート州では、夏季にパネル表面温度が日常的に70°Cを超えます。ロボットのハードウェア、ブラシ素材、駆動システム、バッテリーパックは、インドの環境条件に対する定格性能を満たしている必要があります。
インド国内でのサービス体制:アガル(マディヤ・プラデーシュ州)やヤドギール(カルナタカ州)にある発電所では、海外からのスペアパーツ供給を3週間も待つことはできません。契約前に、故障時の当日または翌日対応が可能か確認してください。
インド国内製造の優位性:インド国内で製造されたロボットは、通関手続きの迅速化、ALMMリストのエコシステムへの適合、輸入関税の低減といった恩恵を受けられます。プネーのチャカンにあるTayproの施設は、インドにおける数少ない主要な太陽光パネル洗浄ロボット製造拠点です。
AMC(年間保守契約)の構造:年間保守契約の内容を慎重に評価してください。契約外の追加料金、対応までの長いSLA(サービス品質保証)、部品代が別料金といった条項があると、当初は安価に見えたロボットが、5年間の稼働期間で見ると非常に高コストになる可能性があります。
地域別:インドの太陽光発電所における汚れの傾向
汚れの性質は場所によって異なります。発電所の汚れの傾向を理解することは、最適な洗浄頻度を決定する上で不可欠であり、ロボットの必要台数、スケジュール設定、そして投資収益率(ROI)に直結します。
地域 | 主な汚れの種類 | 年間の標準損失率 | 推奨される洗浄頻度 |
|---|---|---|---|
ラジャスタン州(タール砂漠) | 砂・砂漠の塵 | 15~30% | 毎日または2日ごと |
グジャラート州(カッチ/モルビ) | 産業汚染物・塩分粒子 | 12~22% | 2~3日ごと |
マディヤ・プラデーシュ州(アガル、レーワ) | 農地の土埃・花粉 | 8~15% | 3~5日ごと |
カルナタカ州(ヤドギール、パヴァガダ) | 赤いラテライト土壌 | 10~18% | 2~4日ごと |
マハーラーシュトラ州(ソラプール、アウランガーバード) | 道路の埃・農地の土埃 | 8~14% | 3~5日ごと |
アーンドラ・プラデーシュ州/テランガーナ州 | 混合した土埃・鳥の糞 | 8~16% | 3~4日ごと |
TayproのNECTYRプラットフォームに実装されているAI/MLを活用したスケジューリングでは、気象データ、汚れセンサー、パフォーマンス比(PR)監視に基づいて洗浄頻度を自動調整します。これにより、過剰な洗浄によるロボットの稼働サイクル浪費と、不足による売電機会の損失の両方を回避し、ロボットの寿命を延ばしながら発電所パフォーマンスを最大化します。
ROIと投資回収:数値が示す真実
洗浄ロボット群への投資を検討する際にすべての発電所オーナーが抱く問いは「いつ投資を回収できるのか」という点に集約されます。以下は、インド中央部における100 MWの固定架台式ユーティリティ発電所を想定した現実的なモデルケースです。
項目 | ロボットなし(手動洗浄) | 自律型ロボット活用時 |
|---|---|---|
年間発電量(ベースライン) | 170 GWh | 170 GWh |
平均汚れ損失率 | 約12% | 約1.5% |
汚れによる発電損失 | 20.4 GWh | 2.55 GWh |
回収された発電量 | , | +17.85 GWh/年 |
回収収益 (@ ₹3/kWh) | , | 約 ₹5.35 Cr/年 |
削減された水コスト | , | 約 ₹40~60 L/年 |
削減された人件費 | , | 約 ₹30~50 L/年 |
年間合計利益 | , | 約 ₹6.2~6.5 Cr/年 |
ロボットフリートのCAPEX(目安) | , | 約 ₹8~12 Cr |
投資回収期間 | , | 約18~24か月 |
注: 上記の数値は例示です。実際のROIは、お客様の汚れの状況、PPA価格、O&Mコスト、および発電所のレイアウトによって異なります。特定の発電所の見積もりには、Tayproの無料ROIおよび価格計算ツールをご利用ください。
CAPEXとOpex:どのモデルが最適か?
Tayproは両方のモデルを提供しています。CAPEXとは、TayproのAMC(保守契約)を利用してロボットを直接所有する形態で、発電量の回復による利益を最大限に享受できます。Taypro Opexは、パネル洗浄ごとの従量課金モデルであり、初期ハードウェアコストを負担することなく、Tayproが貴社のプラント全体で運用を行います。資金に制約がある場合やハードウェアリスクを回避したい事業者様には、Opexの方が優れた商業構造となります。一方、強固なバランスシートを持ち、長期的な発電所運用を計画されている事業者様には、CAPEXの方が生涯リターンは高くなる傾向にあります。
洗浄技術の徹底解説:乾式 vs. 湿式
太陽光パネル洗浄ロボットを選択する上で最も重要な選択肢の一つが、その基礎となる洗浄技術です。2026年のインドにおいて、水を使用しない乾式洗浄を採用する意義は圧倒的です。
乾式洗浄:インドの標準
乾式洗浄ロボットは、水を使用せずに機械的な動作、マイクロファイバーパッド、ポリエステルブラシ、またはエアジェットシステムを使用して埃を除去します。優れた乾式システムは、多段階のアプローチを採用しています:
第1段階:エアリフト:指向性のある気流によりパネル表面の埃を浮かせ、接触洗浄中に埃が擦り込まれるのを防ぎます。
第2段階:接触拭き取り:マイクロファイバー素材が制御されたトラバースでパネルに接触し、パネルガラスを傷つけることなく浮いた埃をキャプチャします。
これがTayproの特許取得済みデュアルパスシステムの原理です。水洗浄と同等のパネル清浄度を実現しつつ、水インフラや冷水によるホットスポットへの熱衝撃、硬水によるミネラル堆積を排除します。
湿式/水補助洗浄
湿式洗浄ロボットは、回転ブラシを使用し、脱イオン水から一般的な水道水まで様々な水を使用します。頑固な固着汚れには有効ですが、インドのユーティリティスケール発電所においては、現実的な制約が深刻です:
遠隔地における給水車のロジスティクスには1回あたり ₹3,000~8,000のコストがかかり、すべてのエリアへの道路アクセスが必要です。
硬水(高TDS)は時間の経過とともにパネルの透過率を低下させるミネラル沈着を残します。
高温のパネルに冷水をかけると熱ストレスが生じ、長年の運用でセルにマイクロクラックが発生する可能性があります。
湿式洗浄には電気的な安全リスクが伴い、プラントの完全シャットダウンや非常に慎重な絶縁対策が求められます。
結論:インドの大半のユーティリティスケール太陽光発電所において、乾式洗浄が正しい技術選択です。水を使用した洗浄は、通常のO&M運用ではなく、頑固な汚れの定期的なスポット洗浄に限定すべきです。
なぜフリート管理ソフトウェアが不可欠なのか

2026年現在、堅牢なフリートソフトウェアプラットフォームを備えていない太陽光洗浄ロボットを購入することは、ダッシュボードのない自動車を買うようなものです。ロボットはハードウェアであり、洗浄作業を競争上の優位性へと変えるのはソフトウェアです。
現代のフリートソフトウェアに求められる機能
AI/MLスケジューリング:汚れセンサーのデータ、天気予報、過去のパフォーマンス比率の傾向に基づいて洗浄頻度が自動的に調整され、無駄な稼働や洗浄漏れを排除します。
リアルタイムのフリート監視:すべての拠点の全ロボットの現在位置、洗浄ステータス、バッテリー残量、アラート状態を単一のダッシュボードで可視化します。
洗浄監査ログ:すべての洗浄パスがタイムスタンプ、ロボットID、列ID、完了ステータスと共に記録され、IPP報告、貸し手へのコンプライアンス、保険のための信頼性の高い監査可能なO&M記録を作成します。
AMCチケット統合:洗浄データと同じプラットフォーム上で、スペアパーツの請求、フィールドエンジニアの派遣、サービス履歴を管理します。TayproのNECTYRポータルは、2022年以来、150以上の稼働サイトでこの統合モデルを運用しています。
次の層:ORIONプラントインテリジェンス
Tayproが近日提供を開始するORIONプラントインテリジェンスプラットフォームは、次のステップへ踏み出します。洗浄イベントとSCADAの発電データを相関させることで、パフォーマンスの低いブロックを特定し、汚れによる発電低下を予測し、O&M運用と商業的成果を結びつけます。複数サイトのポートフォリオを管理するIPPにとって、ORIONは運用可視性の面で真の飛躍を意味します。
NECTYRフリートテレメトリは、2022年以来、150以上のライブサイトと5 GW以上の導入済みロボット容量にわたってデータを記録しています。このデータセットこそがTayproの最も永続的な優位性であり、学習するAIモデルは、サイトの稼働期間が長くなるたびにスケジューリングの精度と故障予測を向上させています。
結論と推奨事項
2026年の太陽光パネル洗浄ロボット市場は、もはやニッチなカテゴリではなく、本格的に運用されるユーティリティスケール太陽光発電所にとっての中核的なインフラです。インドのソーラーベルトでは汚れによる損失が年間発電量の8~30%を占めており、もはや「ロボット洗浄を導入すべきかどうか」ではなく、「どのシステムを採用し、どのような商業モデルを選ぶべきか」が問われています。
用途 | 2026年のベストチョイス | 理由 |
|---|---|---|
大規模ユーティリティ、固定架台、インド | Taypro GLYDE + NECTYR | デュアルパス洗浄、インド全土をカバーするサービス網、250 MW以上での実績 |
インド・単軸トラッカー発電所 | Taypro GLYDE-X / NYUMA-X | インド製唯一のトラッカー用ロボット。NECTYR統合済み、現地保守点検(AMC)対応 |
インド・分散型/小規模区画 | Taypro HELYX | 柔軟な半自動式、水を使わない洗浄、導入コストが低い、150以上の導入実績 |
初期資本投資なし | Taypro Opexサービス | 洗浄パネル単位の課金、Tayproによる運用管理、CAPEXゼロ |
MENA地域・世界的な砂漠地帯 | Ecoppia T4 / NOMADD | 過酷な砂漠環境での実証済み、世界的な導入基盤 |
欧州・産業用屋上設置 | SolarCleano B1 / F1 | 屋上・地上兼用の汎用性、リモコン操作、欧州のサポート体制 |
Tayproはインドで唯一、ユーティリティスケール(大規模)太陽光発電パネル洗浄ロボットの製造、設計、構築、サポートを行う企業です。5 GW以上のロボット稼働容量とNECTYRに接続された150以上の稼働サイトにより、拠点が増えるごとにフリートデータとサービスネットワークの利点が拡大します。
発電機会を逃さないために、貴社発電所のROIシミュレーションを実行し、CAPEX(資本的支出)とOpex(運営費)のどちらが適した商用モデルか評価し、貴社の発電所タイプや汚れの状況に最適なロボットを導入してください。Tayproのアプリケーションチームに連絡し、各発電所に合わせた推奨プランをご確認ください。
関連リソース
インドでロボット洗浄を検討している調達および運用保守(O&M)チームへ:
関連資料
よくある質問
メガソーラー発電所においては、Taypro社のGLYDE(固定架台向け)およびGLYDE-X(1軸追尾式向け)が最も優れた選択肢です。特許取得済みのデュアルパス乾式洗浄技術、インド国内で最も充実したサービスネットワーク、TÜV NORD認証を取得したハードウェア、そしてNECTYRフリート管理ソフトウェアプラットフォームが統合されています。小規模または分散した区画には、同じ乾式技術を採用した半自動ロボットのHELYXが経済的な導入オプションとなります。
インドの立地条件により異なりますが、汚れによる太陽光パネルの出力低下は年間で8–30%に達します。1–5日サイクルのロボット洗浄プログラムを導入することで、汚れによる実質的なロスを2%未満に抑えることが可能です。100 MWの発電所の場合、年間で15–25 GWhの発電量回復が見込めます。
Taypro GLYDEシリーズのような専用設計のロボットは、柔らかいマイクロファイバー素材と制御された接触圧を使用しており、パネルガラスに傷をつけないよう設計されています。LONGi、Trina Solar、JA Solar、Canadian Solarなどの主要パネルメーカーは、適合するロボットモデルを認証済みです。ロボットを導入する際は、必ず事前にパネルメーカーの適合確認を行ってください。
必要なロボットの台数は、パネルの枚数、列の長さ、要求される洗浄頻度、およびロボットの洗浄速度によって異なります。目安として、汚れが中程度の地域の100 MW固定架台式発電所では、2日ごとの洗浄サイクルの場合、通常40–80台の完全自律型ロボットが必要です。Tayproの無料ROI計算ツールを使用して、発電所ごとの試算を行うことを推奨します。
どちらも有効な選択肢です。CAPEXはハードウェアの所有とTaypro社のAMC(保守契約)により、長期的に最も高いROIが得られます。TayproのOPEX(パネル洗浄ごとの従量課金)は、初期費用、ハードウェアのリスク、メンテナンスの負担を排除し、Tayproが発電所でフリートを運用します。資本が限られている、または予測可能なO&Mコストを求めるIPP(独立系発電事業者)にはOPEXが推奨されます。強固なバランスシートを持ち、長期的な発電所運用を行うオーナーにとっては、CAPEXの方が生涯リターンは高くなる傾向にあります。
はい。GLYDE-XおよびNYUMA-Xは1軸追尾式発電所専用に設計されており、追尾列の移行に対応する柔軟な360度ブリッジを備えています。インドの新規メガソーラープロジェクトでは追尾式が標準となっており、これら追尾式専用モデルはTayproの導入実績の中で急速に拡大している製品ラインです。