太陽光パネル洗浄ロボットは、一般消費者向けのガジェットではなく、現場用の産業機器です。インドのメガソーラープラントにおいて、人手、給水タンク車、嵐の後の復旧作業などがメガワット単位の規模や砂塵の量に対応できない場合、オペレーターが洗浄頻度を維持するための手段となります。ロボットとは何か(そして何ではないか)、その性質を正しく理解することは、列の形状、モジュールの保証、O&Mの期待値との間の高コストな不一致を防ぐことにつながります。
本記事では、資産所有者、EPCチーム、および金融機関向けに、洗浄ロボットを定義します。その主な構成要素、メガワット規模の発電所での展開状況、そして手作業の清掃クルー、トラクターブラシ、固定式スプリンクラーとの違いについて解説します。
クイックアンサー
- ロボットはパネルの列を走行し、多くの場合水を使わずにOEM認定のヘッドでガラスを洗浄します。
- 対象はメガソーラーや大規模な産業用地上設置型であり、一般的な住宅の屋根ではありません。
- 価値を生むのは単なる自動化ではなく、処理能力と洗浄範囲のログ記録です。
- 他のプラント設備と同様に、列への適合性、オペレーターのトレーニング、フリートのO&Mが必要です。
- メカニズムの解説: 太陽光洗浄ロボットの仕組み
メガソーラー用洗浄ロボットの主要構成要素
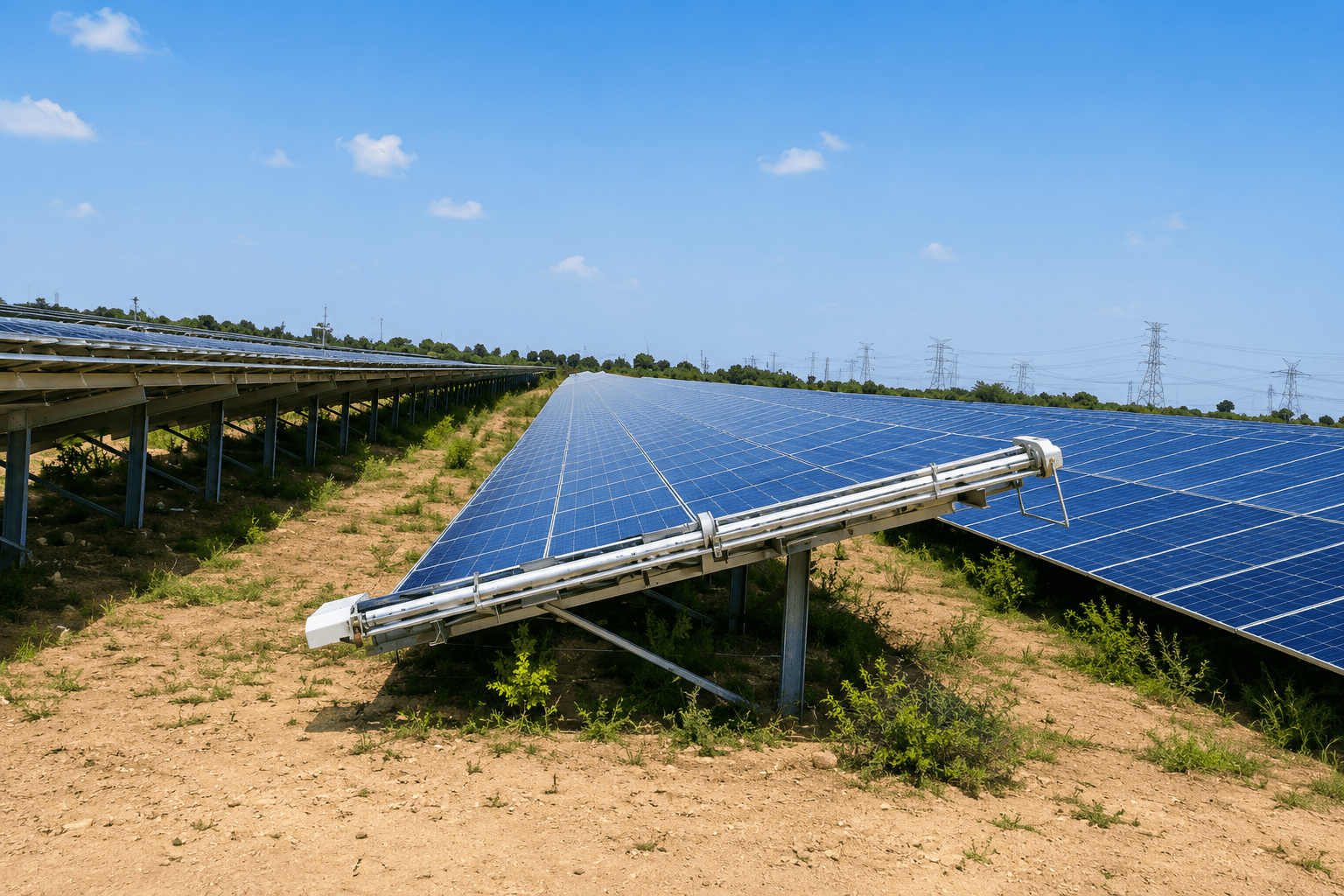
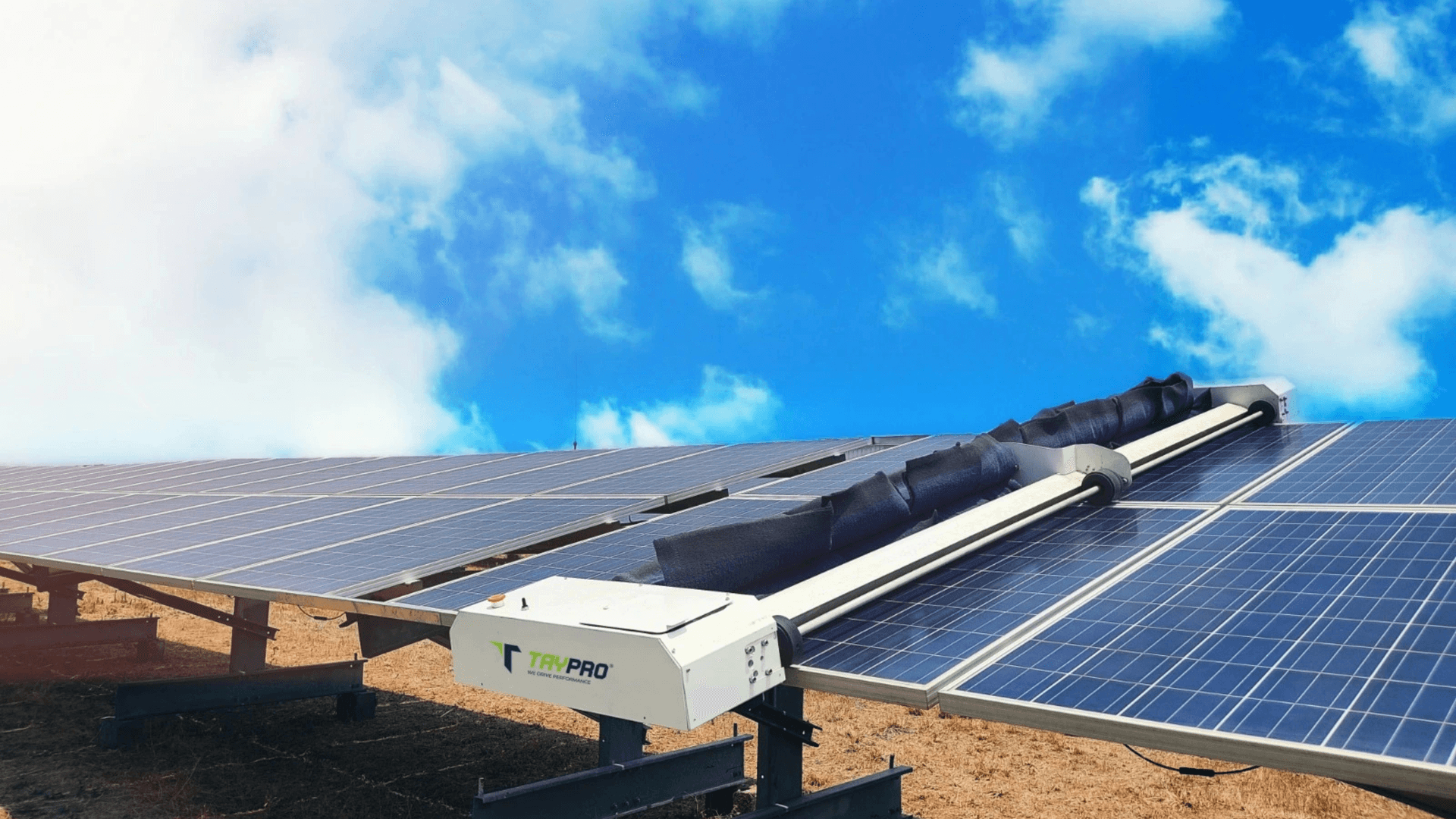
ほとんどの産業用ロボットは、現地の砂塵負荷に合わせて調整された共通のアーキテクチャを共有しています。走行シャシーは1列または2列のモジュールをまたぎ、架台の隙間を考慮した車輪やクローラーを備えています。ブラシは、ベンダーや汚れの種類に応じて、マイクロファイバー、ナイロン混合素材、または特許取得済みのデュアルパスヘッドが使用されます。電源は列の端で交換するオンボードバッテリー、または一部の設計では軽量なテザーケーブルから供給されます。
ナビゲーションには、列端のセンサー、RFIDマーカー、またはビジョンシステムを使用してアライメントを維持します。フリート管理ソフトウェアは、走行スケジュールを管理し、完了した列を記録し、強風、障害物、通信途絶による中断を警告します。制御室との統合はベンダーによって異なりますが、資産管理レビュー用に洗浄ログを出力するケースが増えています。
設置環境の詳細: PV洗浄ロボットの設置方法(グリーンフィールドおよびブラウンフィールドサイト)
ロボットと他の洗浄アプローチの比較
| アプローチ | 移動可能か | 一般的な規模 | 水の使用量 | 洗浄ログ記録 |
|---|---|---|---|---|
| 手作業(ポール使用) | はい | 全規模 | 多くの場合多い(水洗い) | 手動の品質管理以外では稀 |
| トラクター搭載ブラシ | はい | 大型固定架台 | 中~多 | 最小限 |
| 固定スプリンクラー | いいえ | EPC設計時に組み込み | 多い | タイマー管理のみ |
| 自律型洗浄ロボット | はい | 10 MW以上の産業用に一般的 | 少ない(水なし設計) | デジタル列ログ |
インドのメガソーラーでロボットが解決する課題
インド西部の砂塵地帯では、手作業による間隔の長い清掃の間にPR(パフォーマンス比)が数ポイント低下することがあります。砂嵐の後のタンク車の列や作業員の動員は、計画されていた週次清掃を10日サイクルにまで引き延ばし、手つかずのブロックでは発電量が失われます。水不足や排水に対する厳しい監視は、水洗いのみのプログラムをコスト面およびESG報告の両面で困難にしています。
ロボットは処理能力と頻度の課題に対処します。優先度の高いブロックに対して夜間を中心に月数回のパスを行い、水の使用量も抑えられます。ただし、O&Mが不要になるわけではありません。オペレーターは、他の重要なプラントサブシステムと同様に、バッテリー、ブラシの摩耗、ファームウェアの更新、嵐による中断を管理する必要があります。
事例:10 MWプラントでのロボット導入検討(例)
ラジャスタン州の10 MW固定架台サイトを検討します。乾季の汚れにより、10〜14日ごとの手作業の間でPRが4〜6%低下します。汚れのひどいブロックに対して週2〜3回のパスを行うロボットフリートを導入すれば、稼働率や洗浄範囲にもよりますが、PRをベースラインに近い1.5〜3%減の範囲に維持できる可能性があります。
| 要因 | 手作業(水洗い) | ロボットフリート |
|---|---|---|
| プラント全体の洗浄サイクル | 7〜14日 | 2〜5日(複数ロボット) |
| 水使用量(L/MW/月) | 数千(サイト依存) | ほぼゼロ(水なし) |
| 年間O&M費用 | 450万〜800万ルピー | 350万〜650万ルピー(資本支出償却含む) |
| 監査証跡 | 請求書と写真 | 列単位の洗浄ログ |
これらは見積もりではありません。貴社の関税と汚れの状況をROI計算ツールおよび10 MWコスト比較資料でシミュレーションしてください。
固定架台とトラッカーへの導入の違い
固定架台用ロボットの構造はシンプルです。列の幅が一定で、端の旋回も予測可能であり、収納時のインターロックも少なくなります。一方、トラッカー用ロボットは、夜間の収納角度で適切に動作し、風速制限を遵守し、ケーブルトレイやモーターの突起がある長い列を走行しなければなりません。固定架台で認定されたロボットが、全てのトラッカーOEMで承認されているわけではありません。
トラッカー対応の自動洗浄およびトラッカーでの運用課題をご覧ください。
ロボットにできないこと
ロボットは、一度設置すれば放置できるスプリンクラーの代替品ではありません。洗浄範囲の管理を怠れば、PRの改善は保証されません。全てのモジュールタイプで自動的に承認されるわけでもありません。ブラシのタイプ、圧力、および化学薬品(使用する場合)について、必ず書面によるOEMの洗浄承認を取得してください。20 kW程度の一般的な屋根設置型のように、すでに人手で十分な場所に適したツールではありません。
AI搭載といったマーケティング用語よりも、稼働率、砂嵐後に完了した列数、リファレンスモジュールでの実証されたPR回復値の方が重要です。
10 MWプラントでロボットが必要になるタイミングとは
手作業による全体洗浄で経済的なPR目標を達成できており、水が安価で、構造が単純な場合、ロボットは投資回収のハードルをクリアできない可能性があります。嵐による汚れが手作業のサイクルを上回る場合、水コストが大きな負担となる場合、あるいはトラッカーの列が多く手作業の効率が悪い場合は、ポートフォリオ全体への導入前に、汚れやすいブロックで試験導入を行ってください。
メリットの詳細: 太陽光プラントでの洗浄ロボット導入のメリット。価格設定: インド向け洗浄ロボット価格ガイド
インドのメガソーラーにおけるフリート規模とオペレーターの役割
砂塵イベントが発生する前に、1台のロボットが50 MWをカバーすることは困難です。所有者は、列の長さ、夜間の作業時間、バッテリー交換時間、目標サイクル日数を基にフリート規模をモデル化します。10 MWサイトでは2〜4台、50 MWでは8〜15台またはゾーン別の段階的導入が必要になる場合があります。
オペレーターは、バッテリー管理、ブラシ交換、ファームウェア更新、中断対応、風対策の調整を行います。シフトごとにフリートクラスタ単位で1名のオペレーターに加え、共有の保守サポート体制を予算化してください。
安全、保険、HSE(健康・安全・環境)
夜間の運用には、通路の照明、交通計画、および試験作業クルーとのロックアウト調整が必要です。保険は、ロボットに起因するモジュール損傷をカバーするサブリミット付きのものを選定してください。HSEリスク登録においてロボットを産業機器として扱い、ベンダーのトレーニング証明書を保管してください。
SCADAおよび資産管理システムとの統合
最新のフリートは、列の完了状況、中断コード、バッテリーサイクルなどのデータをCSVやAPIでO&Mプラットフォームに出力します。月次レポートをレビューする金融機関は、ロボットの稼働時間だけでなく、PRと連動した洗浄範囲率を確認したがります。ベンダー独自のダッシュボードに依存しないよう、調達RFPでデータ出力形式をあらかじめ指定してください。
ライフサイクル:試運転、3年目、リパワー
試運転には、経路マッピング、OEM承認書類の提出、オペレーター認証が含まれます。3年目までには、ブラシの摩耗パターンとバッテリーの劣化状況を考慮した交換予算を立てる必要があります。新しいモジュールへのリパワー時にはシャシーのアップグレードが必要になる場合があるため、ロボットの適合性は後付けではなく、リパワー計画の一部として検討してください。
インドのRFPで目にするロボットの種類
メガソーラーのRFPでは、固定架台用のレール搭載型、トラッカー用の自律走行クローラー型、あるいは半自動と銘打ったトラクター牽引型などが指定されることがあります。それぞれ、洗浄証明、水使用量、夜間窓口での要件が異なります。最近のラジャスタンやグジャラートのトラッカー案件ではクローラー型が主流ですが、古い固定架台ではレール型も根強く残っています。
ベンダーにはどのカテゴリーかを問い、貴社の設備と同じ形状で稼働している動画や視察の証拠を求めてください。
バイヤーへの重要なポイント
- 洗浄頻度、範囲、水使用量、PR回復といったO&Mの成果でロボットを定義すること。
- 本格調達の前に、汚れやすい代表的なブロックで試験導入を行うこと。
- ベンダーとの契約にモジュールOEMの承認と洗浄ログ提出を含めること。
- 固定架台かトラッカーか、ロボットのタイプを構造に合わせて厳密に選定すること。
- 5年間のTCO(総保有コスト)で比較すること(リスト価格や単一の請求書での比較は避ける)。
列の適合性調査とOEMの承認後にのみ調達を行ってください。最も長いトラッカー列を洗浄できないハードウェアは、定価を払っても部分的な解決策にしかなりません。
関連リソース
よくある質問
ソーラーパネル洗浄ロボットは、自律走行または半自律走行型の装置です。特殊なブラシヘッドや水を使用しない洗浄システムを用いてモジュール列上を移動し、塵や汚れを除去します。メガソーラー発電所では、日中の発電ロスを回避するため、また必要に応じてトラッカーの格納位置に合わせるため、通常は夜間に運転スケジュールが組まれます。
いいえ、異なります。スプリンクラーはEPC段階で設置される固定式の配管設備であり、ゾーンタイマーで制御されます。一方、ロボットはバッテリーまたは給電ケーブルを備えた移動式プラットフォームであり、ナビゲーションセンサー、ブラシアセンブリ、およびフリート管理ソフトウェアを搭載しています。水の使用量、洗浄範囲の記録、および経済性の面で両者は大きく異なります。
ロボットは、ラジャスタン州やグジャラート州のような塵が多く水不足の地域にある、10 MW以上のメガソーラー発電所で最も一般的です。手作業による列ごとの洗浄作業が効率的でない1軸トラッカー採用の発電所で導入が進んでいます。小規模な自家消費型や産業用の屋根置き型システムでは、ロボット導入の経済的合理性が認められるケースは稀です。
列の形状との適合性、モジュールメーカーによる書面での洗浄承認、洗浄記録のログ取得機能、トラッカーの風速および格納位置との連動、スペアパーツやバッテリーの供給戦略、そして汚損頻度に基づいた手作業による洗浄との5年間のTCO(総所有コスト)比較モデルを確認する必要があります。
どちらも機械的に塵を除去する点では共通しています。ロボットは、再現性の高い速度と圧力、大規模な夜間スケジュール運用、監査用のデジタル記録の生成が可能です。一方、作業員による手作業は不規則なレイアウトに対して柔軟に対応できますが、50 MWを超える大規模発電所では、砂嵐後の洗浄頻度を維持することが困難です。