太陽光発電の洗浄イノベーションに関する見出しでは、背景を抜きにガジェットが羅列されることがよくあります。2024年から2026年にかけて測定可能なPR(性能比)向上を実現したインドのユーティリティ規模の発電所では、その手法が水を使わないロボット洗浄、通過履歴を伴うフリート監視、長いトラッカー列での計画的なバッテリー交換、そして湿ったモジュールに対するダメージを防ぐ天候連動型の中断ロジックといった、より絞り込まれたスタックへと収束しました。
本記事では、誇大広告を削ぎ落とし、25MWから500MW規模の資産で同様のプログラムを検討している独立系発電事業者(IPP)向けに、トップクラスの事業者が実際に導入しているもの、採用の原動力、比較表、および検証手順について文書化します。
クイックアンサー
- 水を使わないロボットが乾燥したインドの新しいユーティリティ市場で主流となっています。
- 夜間のトラッカー洗浄は、日中の売電損失を回避します。
- フリートログにより、AMC(年間保守契約)および金融機関向けの洗浄範囲を証明します。
- ハイブリッドな手動バックアップは、泥や例外的な状況のために残されています。
- 競合の真似をするのは、自社の区画でパイロットによるPRの実証を確認してからにしてください。
暦ベースのウェット洗浄からロボットプログラムへの移行
従来のユーティリティ運用保守(O&M)では、年間2~4回のウェット洗浄と嵐の後の臨時対応が予定されていました。しかし、この頻度ではインド西部の乾季の汚れ率に対応できません。現在、主要な発電所では、自律的な乾式ブラッシングを用いて、最も汚れのひどい区画で5~10日ごとに完全な洗浄範囲を確保することを目標としており、ウェット洗浄はモンスーン後の泥やロボットがアクセスできない場所のみに限定しています。
イノベーションとは単なる購入注文ではなく、運用リズムとハードウェアの組み合わせです。洗浄管理が徹底されていない発電所では、ロボットが稼働していない一方でPRが悪化し続けています。
水を使わないロボット洗浄:ユーティリティが採用する理由
| 推進要因 | 手動ウェット洗浄の課題 | 水を使わないロボットによる対応 |
|---|---|---|
| 水不足 | 給水車の順番待ち、井戸の制限 | 乾式洗浄でほぼゼロリットル |
| 人員配置 | 嵐の後5~10日の対応 | 現場のフリートから夜間に配備 |
| ESG開示 | MWhあたりの取水量の増加 | 報告される水強度の低減 |
| 洗浄証明 | 紙のチケット | タイムスタンプ付きの通過ログ |
| 規模 | 100MW超での人員制限 | 複数ロボットゾーンによる並列処理 |
詳細:従来の洗浄方法とTayproの自律型水なしロボットの比較
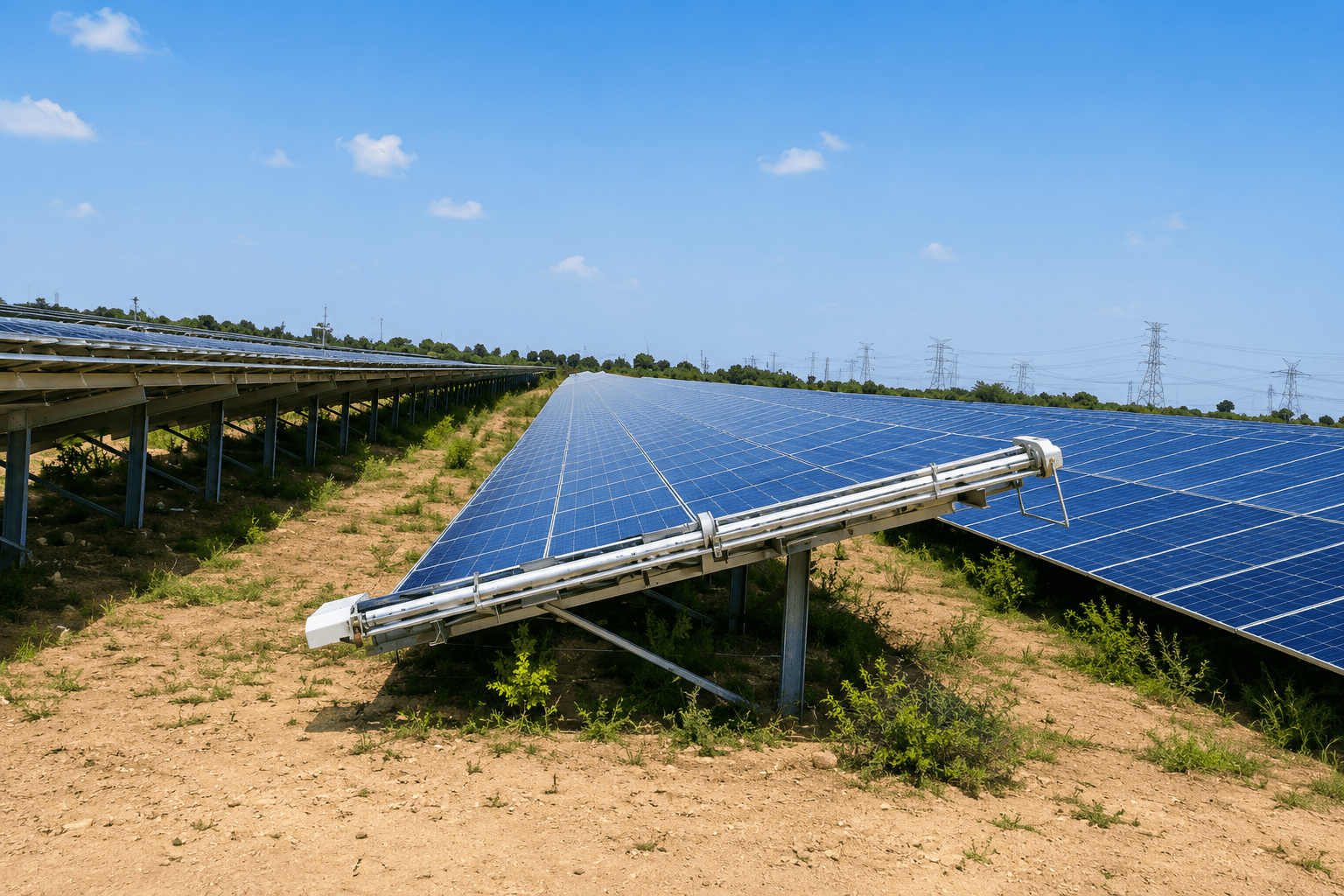
標準慣行としてのトラッカー夜間洗浄
インドの新しいユーティリティ容量の大部分は、単軸トラッカーが占めています。日中の洗浄は通電中の列で送電損失を発生させ、長大なスパンで作業員を熱にさらします。トップクラスの農場では、風速制限が許す限り、OEMが承認したブラシ接触パラメータを用いて、収納状態を考慮した夜間洗浄プログラムを実行しています。イノベーションには、ハードウェアの購入だけでなく、風速超過時に停止し、ログに中止コードを残して再開するインターロック機能が含まれています。
こちらを参照:トラッカーと固定架台におけるロボット洗浄の比較
フリート通信と監視の導入
大規模な区画では、一般消費者向けのWiFiは安定しません。主要な導入事例では、ロボットからゲートウェイ、そして制御室までメッシュ無線を使用し、リンクが不安定な場合でも通過確認を保存しています。事業者は日照が強まる前に、ダッシュボードで洗浄除外された区画を確認します。エクスポート可能なサイクルログは、投資家向けレポートにおける性能比の橋渡しをサポートします。
アーキテクチャの参照:太陽光発電所におけるRFメッシュ通信
バッテリー交換とルーティングのイノベーション
長い列ではシングルサイクルでバッテリーを使い果たします。トップクラスの農場では、夜勤中に充電済みパックを交換ポイントでローテーションさせ、デッドトラベルを最小限に抑えるアレイマッピングソフトウェアと組み合わせています。マップがレイアウト変更後に最新の状態に保たれていれば、充電あたりの範囲は、最適化されていない経路と比較して2倍近くに達することがあります。
天候連動型の中断と降雨検知
イノベーションには、条件の悪い夜間に洗浄しないという判断も含まれます。露や小雨の後に洗浄エレメントが湿った状態で乾式洗浄を強行すると、汚れを引きずりダメージを与える原因となります。自動延期と予報入力を組み合わせることで、モジュールを保護しつつ、O&Mの透明性のために延期理由を記録します。
トップクラスの発電所が行っていないこと
- インバーターやトラッカーのメンテナンスを無視し、O&Mのすべてをロボットに置き換えること。
- スペアコストを削減するために承認されていない種類のブラシを使用すること。
- フリート発注前にパイロットによるPR測定をスキップすること。
- エクスポート可能なログなしで、ベンダーのアップタイム資料を契約上のKPIとして扱うこと。
- 150MW超の粉塵地帯で、汚れのコストをモデル化せずに手動のみのカレンダーを使用すること。
発電所プロファイル別の導入スナップショット(例)
| プロファイル | 一般的なイノベーションパッケージ | 残される手動対応 |
|---|---|---|
| 50MW ラージャスターン州 固定架台 | 水なしロボット4~6台、夜間洗浄 | モンスーン後の縁の泥汚れ |
| 120MW グジャラート州 トラッカー | ロボット8~12台、交換運用、メッシュ通信 | 嵐の泥、形状上の例外 |
| 200MW マルチブロックIPP | ゾーン別フリート+中央のNECTYR型ダッシュボード | 契約によるウェット洗浄スタッフ |
| 25MW 軽度の汚れ | 手動最適化、ロボットパイロットはオプション | 主な手法 |
ベンダーのシミュレーションを使用して、実際のレイアウトに基づいた台数を確認してください。
他所の成功事例を模倣する前の確認事項
- 参照モジュールを用いて、汚れの激しい2つのブロックでパイロット運用を行う。
- 可能であれば、ピアベンダーから30日間のカバレッジデータとPRエクスポートを要求する。
- 列の形状とOEM承認が自社のモジュールに適合しているか確認する。
- 自社のPPA料金に基づき、5年間のTCOを手動洗浄と比較モデル化する。
- データエクスポート、稼働時間帯、スペアパーツのSLAを契約に盛り込む。
以下を参照:発電所向け洗浄システムの選び方 および ROI計算ツール
インドのトップ発電所は水なしロボットを標準化しているか?
水不足の州にある約50MW以上の汚れが激しいユーティリティ資産では、ロボットによる水なし洗浄プログラムが新しいO&M入札のデフォルトのイノベーションの道となっています。規模が小さい、あるいは汚れが軽微な現場では、チケットシステムを改善した手動洗浄が維持される場合があります。共通する傾向は、単一のブランド名ではなく、PRに紐付いた測定可能な洗浄範囲にあります。
トップクラスの発電所が求める入札仕様
主要なIPPの入札では、乾燥地帯の50MW以上の区画に対して、水なしロボット洗浄が推奨オプションとして指定されています。これには、最小カバレッジKPI、モジュールOEMの承認、エクスポート可能な通過ログ、モンスーン後の泥汚れに対するハイブリッド手動洗浄条項が含まれます。慢性的な洗浄不足に対するペナルティや、基準ブロックでPR目標を超過した場合のボーナスなども記載されます。イノベーションとは、ハードウェアの納入だけで期待されるものではなく、契約によって担保されるものです。
デュアルパスブラシとシングルパスの旧式ロボット
| アプローチ | 微細な塵の除去能力 | 一般的な導入トレンド |
|---|---|---|
| シングルパス高速ブラシ | かかと状の跡が残る可能性 | 初期のロボットフリート |
| デュアルパス水なし | 持ち上げ+仕上げパス | ラージャスターン州・グジャラート州の新規入札 |
| 手動ウェットのみ | 泥汚れに強い | 主要な手法としては減少傾向 |
イノベーションを加速させるデータ優位性
大規模なフリートポートフォリオに接続された発電所は、他の場所でのGW規模の日常処理からスケジューリングの知見を継承できます。新しい現場は、GW規模の洗浄データ優位性で説明されているクロスサイトのダストライブラリの恩恵を受けられます。独立した手動サイトでは、テレメトリ出力機能を持つ自律型プログラムに参加しない限り、その学習曲線を再現することはできません。
2020年の手動デフォルトから2026年のロボット優先への変化
水コストと供給ショック後の労働力確保の問題により、IPPは洗浄コストを厳しく精査するようになりました。ロボットプラットフォームの重量が軽減される一方で、ブラシのOEM承認は成熟しました。メッシュ通信とバッテリー交換運用により、長い列のトラッカー洗浄範囲の問題が解決されました。トップクラスの発電所は、年1回のウェット洗浄という物語から、最もひどい区画で5~10日ごとの効果的な洗浄を実施する形へと移行しました。イノベーションとは単年のガジェットサイクルではなく、積み重ねられるものです。
中規模IPPは次の洗浄技術を待つべきか?
待機するということは、未定量な汚れによる損失を抱えたまま乾季を過ごすことを意味します。現在の水なしロボットスタックは、適切にパイロット運用されればインドのユーティリティ規模で実証済みです。フリートを全交換しなくても、ソフトウェアやブラシ消耗品のアップグレードパスは存在します。汚れによる低下率が2%以下であり、かつ手動洗浄のサイクルが速く、料金も低い場合を除いては、延期せずにエクスポート可能なデータ要件を伴うパイロット運用を今すぐ開始すべきです。
トップクラスの発電所はイノベーションの成功をどう測るか?
単にロボットの台数だけで測ることはありません。主要なIPPは、洗浄間の平均PRギャップ、エクスポート可能なログによる区画の洗浄範囲パーセント、PPA料金に基づいた洗浄1時間あたりの回収額、モンスーン後の手動洗浄時間を追跡します。イノベーションは、ESGパンフレットに見栄えの良い写真が載った時ではなく、これらの指標が年々改善された時に成功したと言えます。
四半期ごとのレビューでは、フリート導入前後の嵐への対応時間を比較します。グジャラート州の多くの事業者は、交換運用とメッシュ通信が整った乾燥した塵埃イベントにおいて、手作業による動員時間を7~10日から、ロボットによる2~3晩にまで短縮しています。
重要なポイント
- 公益事業におけるイノベーションは、水を使わないロボット、夜間運用、およびフリートデータに集中しています。
- 泥汚れや例外的なケースに対して手作業による水洗浄は残りますが、それは主要な手順ではありません。
- メッシュ通信、バッテリー交換、および気象条件に応じた運用延期は、不可欠な要素です。
- 他社の導入事例を模倣する前に、パイロット運用による実証データを要求してください。
- カバレッジログを伴わないイノベーションは、レンダーや投資委員会のレビューを通過できません。
関連リソース
よくある質問
MW級の大規模発電所では、定期的な手作業による水洗浄から、夜間の清掃スケジュール、通過ログの記録、バッテリー交換運用、天候に基づいた清掃保留ロジック、制御室へのメッシュ通信を備えた水なしロボットフリートへの移行が進んでいます。泥汚れの発生などの例外的な状況に対しては、手作業によるバックアップ運用が併用されています。
ラジャスタン州やグジャラート州のような地域では、取水制限、給水車のコスト、砂嵐後の手作業による清掃動員の遅さが課題となっており、自律的な乾式清掃が注目されています。ロボットは、乾燥した砂塵に対してモジュールあたりほぼゼロリットルの水で、安定した清掃能力を提供します。
導入当初からそうなることは稀です。多くの主要な発電所では、ロボットを主軸にしつつ、固着した泥や特殊な形状の箇所、ロボットが走行できない場所に対して手作業の洗浄チームを配置する運用を行っています。真の技術革新とはロボット単体ではなく、プログラム設計とテレメトリ(遠隔測定)の統合を指します。
架台形状への適合性、モジュールメーカーからの書面による清掃承認、試験区画でのフリート稼働率とカバー範囲のログ、類似した汚れ条件下でのPR(性能比)回復データ、水利用情報の開示影響、そして自社の料金体系における手作業ベースラインとの5年間のTCO(総保有コスト)比較を確認する必要があります。
ダッシュボード上で区画ごとの通過履歴、中断理由、バッテリー指標をエクスポートし、AMC(年間保守契約)やレンダー(融資者)によるレビューに対応できます。予報と連動したスケジュール管理により、清掃の中止や実施の判断を自動化します。エクスポート可能なデータがなければ、ハードウェアの革新も技術顧問の精査に耐えることはできません。